



所属成套资源:浙教版信息技术九年级全册课件PPT整册
浙教版九年级全册第三单元 智能机器人第十五课 机器人认路优秀课件ppt
展开
这是一份浙教版九年级全册第三单元 智能机器人第十五课 机器人认路优秀课件ppt,共14页。PPT课件主要包含了学习任务,灰度传感器,灰度传感器的调节,引导路径,沿线法,骑线法,压线法,各显神通,博弈舞台等内容,欢迎下载使用。
本节课主要认识灰度传感器;了解灰度传感器的调节方法;掌握实现机器人循迹行走的三种方法。
灰度传感器是由一个发射装置和一个接收装置组成。发射装置发出的光线照射到被检测物上,接收装置根据返回光线强度的不同,将其转换为可识别的信号。被检测物灰度越深,反射光越弱,返回的数值就越大;反之,返回的数值就越小。
使用灰度传感器检测物体灰度时,可以将发射、接收装置置于被检物体处,通过灰度检测程序,配合调节装置,可调出合适的返回值,即作为判断条件的数值。将调节装置逆时针旋转,获取的数值变大;顺时针旋转,获取的数值变小。
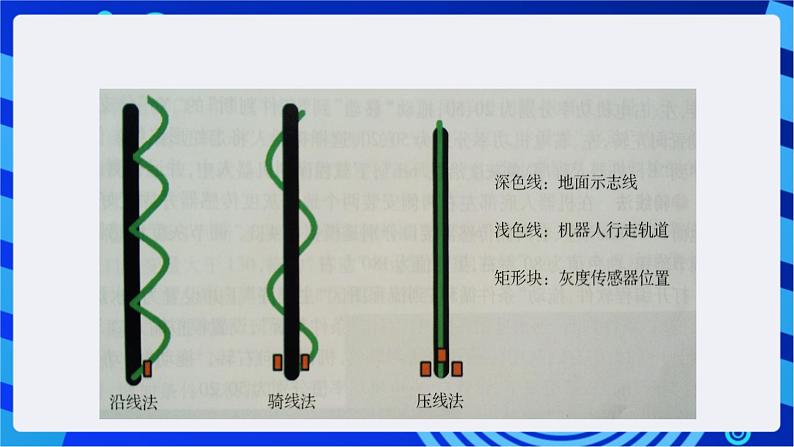
许多城市都设置了盲人专用通道,如果让机器人沿着专用通道带领盲人去医院、商场、公园等地,将会为盲人提供很大的方便。那么这样的认路机器人该怎么设计呢?机器人循迹 机器人利用地面灰度循迹最常见的方法有三种:沿线法、骑线法、压线法
举例说明机器人的主要功能有哪些。
请同学们积极思考,踊跃发言。
请同学们自主练习,如有学习问题,组内交流共同解决。
机器人时装表演队沿着直径为1米的圆进行时装表演,圆周为1cm宽的黑线,试分别用单灰度和双灰度地面传感器来编程序,让机器人沿着黑线行走。
用地面灰度传感器实现鸭妈妈领鸭宝宝过桥。要求:鸭妈妈领着鸭宝宝过桥,鸭妈妈和鸭宝宝均不能掉入河中。请分别设计鸭妈妈及鸭宝宝的机器人程序。试通过地面灰度传感器设计机器人巡逻程序。
在本课学习中,你们学习小组完成了机器人认路的任务了吗?还有哪些学习问题没有解决?
请同学们说一说小组学习成果。
相关课件
这是一份信息技术八年级下册第十五课 添加 ActionScript 代码一等奖课件ppt,共10页。PPT课件主要包含了调用按钮元件,动作面板,使用代码stop,在第一帧使用,指针经过,跳转到某帧播放,play,stop,跳转到某帧停止,注意点等内容,欢迎下载使用。
这是一份浙教版九年级全册第十五课 机器人认路优秀ppt课件,共19页。PPT课件主要包含了准备工作,配置机器人,设置传感器属性,保存机器人,仿真设置,打开程序,仿真运行,拓展与练习等内容,欢迎下载使用。
这是一份浙教版七年级下册第十五课 形象的图表与SmartArt优秀课件ppt,共17页。PPT课件主要包含了绍兴黄酒,绍兴黄酒酿造工艺流程,疑问一,疑问二,任务一,任务二等内容,欢迎下载使用。







