还剩9页未读,
继续阅读
人教版八年级下册第十二章 简单机械12.1 杠杆学案设计
展开
这是一份人教版八年级下册第十二章 简单机械12.1 杠杆学案设计,共12页。学案主要包含了学习目标,知识点解读,深化理解知识点的例题及其解析,本节课的课时作业,计算题等内容,欢迎下载使用。
一、学习目标
1.认识杠杆。
2.会画力臂。
3.通过探究,了解杠杆的平衡条件。
4.理解杠杆的平衡条件,知道三种杠杆的概念、特点及应用。
学习重点是了解杠杆的平衡条件。
学习难点是画力臂。
二、知识点解读
知识点一:杠杆
1.杠杆:在力的作用下能绕着固定点转动的硬棒就是杠杆。
2.杠杆的五要素:①支点:杠杆绕着转动的固定点(O);②动力:使杠杆转动的力(F1);③阻力:阻碍杠杆转动的力(F2);④动力臂:从支点到动力作用线的距离(L1); ⑤阻力臂:从支点到阻力作用线的距离(L2)。
3.力臂的画法:①找出支点,②画出力的作用线,③过支点作力的作用线的垂线。④用大括号把垂线段括起来,并标上力臂的符号。
知识点二:杠杆的平衡条件
1.杠杆的平衡:当有两个力或几个力作用在杠杆上时,杠杆能保持静止或匀速转动 ,则我们说杠杆平衡。
2.杠杆平衡的条件:动力乘以动力臂等于阻力乘以阻力臂,即公式:F1L1=F2L2
知识点三:生活中的杠杆
1.省力杠杆:动力臂大于阻力臂的杠杆,省力但费距离。
2.费力杠杆:动力臂小于阻力臂的杠杆,费力但省距离。
3.等臂杠杆:动力臂等于阻力臂的杠杆,既不省力也不费力。
三、深化理解知识点的例题及其解析
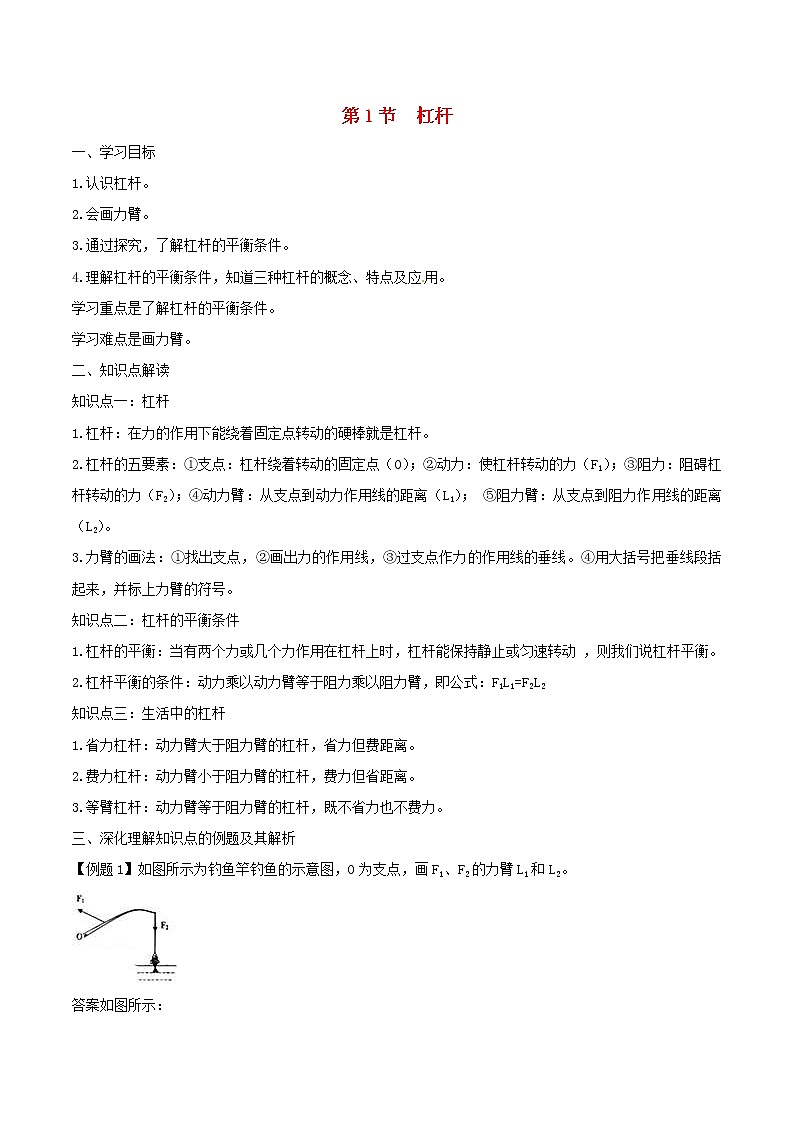
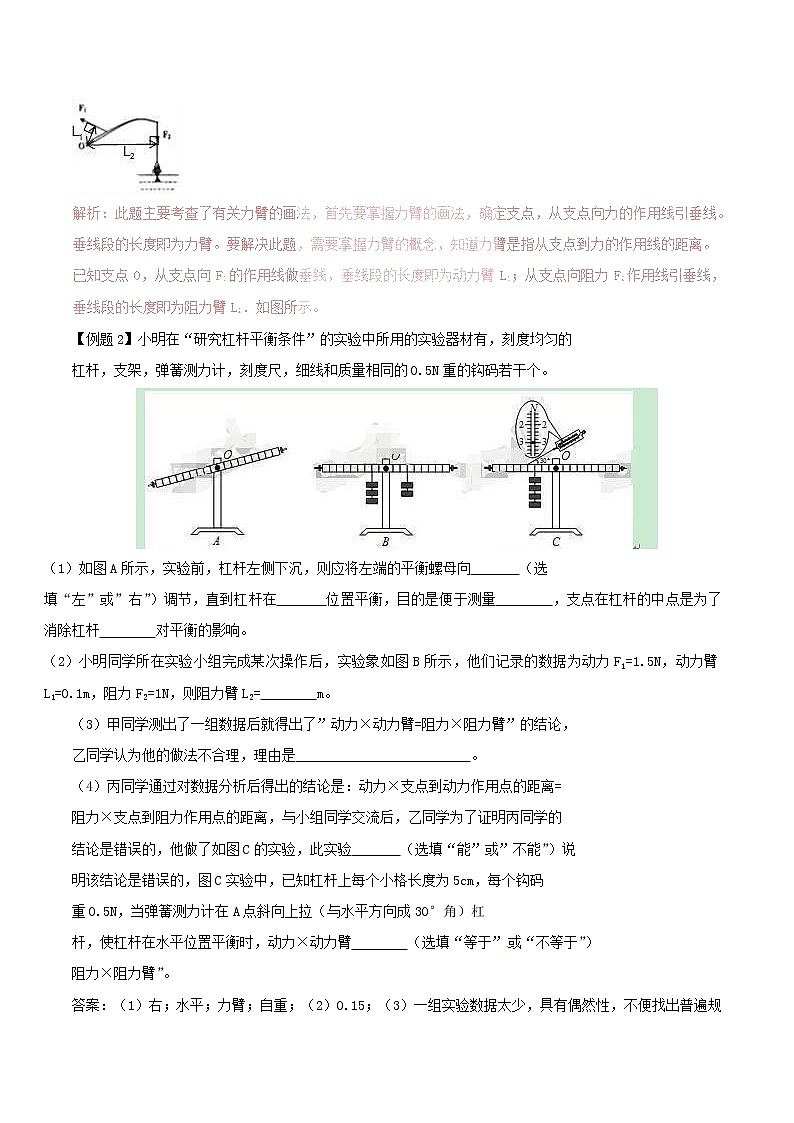
【例题1】如图所示为钓鱼竿钓鱼的示意图,O为支点,画F1、F2的力臂L1和L2。
答案如图所示:
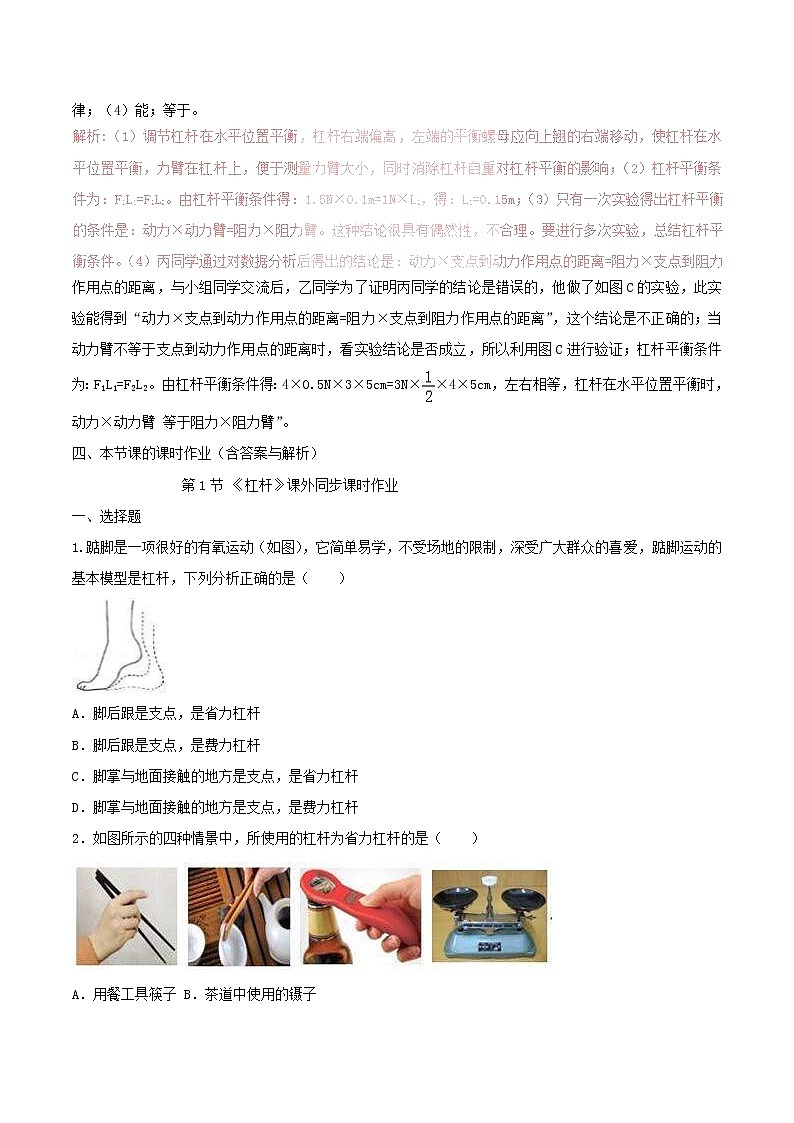
【例题2】小明在“研究杠杆平衡条件”的实验中所用的实验器材有,刻度均匀的
杠杆,支架,弹簧测力计,刻度尺,细线和质量相同的0.5N重的钩码若干个。
(1)如图A所示,实验前,杠杆左侧下沉,则应将左端的平衡螺母向 (选
填“左”或”右”)调节,直到杠杆在 位置平衡,目的是便于测量 ,支点在杠杆的中点是为了消除杠杆 对平衡的影响。
小明同学所在实验小组完成某次操作后,实验象如图B所示,他们记录的数据为动力F1=1.5N,动力臂L1=0.1m,阻力F2=1N,则阻力臂L2= m。
(3)甲同学测出了一组数据后就得出了”动力×动力臂=阻力×阻力臂”的结论,
乙同学认为他的做法不合理,理由是 。
(4)丙同学通过对数据分析后得出的结论是:动力×支点到动力作用点的距离=
阻力×支点到阻力作用点的距离,与小组同学交流后,乙同学为了证明丙同学的
结论是错误的,他做了如图C的实验,此实验 (选填“能”或”不能”)说
明该结论是错误的,图C实验中,已知杠杆上每个小格长度为5cm,每个钩码
重0.5N,当弹簧测力计在A点斜向上拉(与水平方向成30°角)杠
杆,使杠杆在水平位置平衡时,动力×动力臂 (选填“等于”或“不等于”)
阻力×阻力臂”。
答案:(1)右;水平;力臂;自重;(2)0.15;(3)一组实验数据太少,具有偶然性,不便找出普遍规律;(4)能;等于。
作用点的距离,与小组同学交流后,乙同学为了证明丙同学的结论是错误的,他做了如图C的实验,此实验能得到“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,这个结论是不正确的;当动力臂不等于支点到动力作用点的距离时,看实验结论是否成立,所以利用图C进行验证;杠杆平衡条件为:F1L1=F2L2。由杠杆平衡条件得:4×0.5N×3×5cm=3N××4×5cm,左右相等,杠杆在水平位置平衡时,动力×动力臂 等于阻力×阻力臂”。
四、本节课的课时作业(含答案与解析)
第1节 《杠杆》课外同步课时作业
一、选择题
1.踮脚是一项很好的有氧运动(如图),它简单易学,不受场地的限制,深受广大群众的喜爱,踮脚运动的基本模型是杠杆,下列分析正确的是( )
A.脚后跟是支点,是省力杠杆
B.脚后跟是支点,是费力杠杆
C.脚掌与地面接触的地方是支点,是省力杠杆
D.脚掌与地面接触的地方是支点,是费力杠杆
2.如图所示的四种情景中,所使用的杠杆为省力杠杆的是( )
A.用餐工具筷子B.茶道中使用的镊子
C.用起子起瓶盖D.托盘天平
3.如图所示,在均匀杠杆的A处挂3个钩码,B处挂2个钩码,杠杆恰好在水平位置平衡,已知每个钩码的质量均为50g,若在A,B两处各加1个钩码,那么杠杆( )
A.右边向下倾斜B.左边向下倾斜
C.仍保持水平位置平衡D.无法确定杠杆是否平衡
4.如图甲是吊车起吊贷物的结构示意图,伸缩撑杆为圆弧状,工作时它对吊臂的支持力始终与吊臂垂直,使吊臂绕O点缓慢转动,从而将货物提起.图乙杠杆受力及其力臂图示。下列说法正确的是 ( )
A.吊臂是一省力杠杆,但要费距离
B.吊臂是一个费力杠杆,但可以省功
C.匀速顶起吊臂的过程中,伸缩撑杆支持力的力臂变小
D.匀速顶起吊臂的过程中,伸缩撑杆支持力渐渐变小
二、填空题
1.如图所示,一根粗细均匀的硬棒AB被悬挂起来,已知AB=8AO,当在A处悬挂120N的重物G时,杠杆恰好平衡,杠杠自身的重力为 N,若在C处锯掉BC,留下AC杠杠,支点O不变,则需要在A端 (选填“增加”或“减少”)重物,才能使杠杠仍保持水平平衡.
2.如图所示,由不同物质制成的甲和乙两种实心球的体积相等,此时杠杆平衡(杠杆自重、挂盘和细线的质量忽略不计),则杠杆左右两边的力臂之比为 ,1个甲球和1个乙球的质量之比为 ,甲球和乙球的密度之比为 .
3.小明用一把缝衣剪刀剪布,如图所示,他为了省距离应将布放在剪刀的 处,为了省力应将布放在剪刀的 处(填A或B).
4.如图所示,一位母亲推着婴儿车行走,当前轮遇到障碍物时,母亲向下按扶把,若把婴儿车视为杠杆,这时杠杆的支点是 ;当后轮遇到障碍物时,母亲向上抬起扶把,这时婴儿车可视为 杠杆(填“省力”或“费力”).
5.如图所示,一轻质杠杆水平支在支架上,OA=20cm,G1是边长为5cm的正方体,G2重为20N. 当OC=l0cm时,绳子的拉力为_____N,此时G1对地面的压强为2×104Pa. 现用一水平拉力使G2以5cm/s的速度向右匀速直线运动,经过______s后,可使G1对地面的压力恰好为零.
三、作图题
1.试画出力F1、F2的力臂。
2.如图,请在杠杆A处画出把物体拉起时的最小拉力F1,并画出拉力F1的力臂L1.
3.如图所示,杠杆OA在动力F1作用下处于静止状态,请你画出阻力F2及阻力臂L2.
4.如图所示,轻质杠杆OA能绕O点转动,请在杠杆中的A端画出使轻质杠杆保持平衡的最小的力F的示意图(要求保留作图痕迹)。
四、实验探究题
1.某同学做探究杠杆平衡条件的实验.
(1)实验时,为了方便对力臂的测量,该同学先调节平衡螺母,使杠杆在 位置平衡;通过多次实验,该同学得到了杠杆的平衡条件.
(2)实验中,在杠杆上的A点挂四个重均为0.5N的钩码,用调好的弹簧测力计竖直向上拉杠杆上的B点,使杠杆水平平衡,如图所示,测力计的示数是 N;如果将测力计沿图中虚线方向拉,仍使杠杆在水平位置平衡,则测力计的示数将 (变大/不变/变小).
五、计算题
1.如图所示,质量为70kg,边长为20cm的正方体物块A置于水平地面上,通过绳系于轻质杠杆BOC的B端,杠杆可绕O点转动,且BC=3BO。在C端用F=150N的力竖直向下拉杠杆,使杠杆在水平位置平衡,且绳被拉直:(绳重不计,g取10N/kg)求:
(1)物体A的重力G;
(2)绳对杠杆B端的拉力F拉;
(3)此时物体A对地面的压强p。
第1节 《杠杆》课外同步课时作业答案与解析
一、选择题
1.答案:C.
知动力臂大于阻力臂,是省力杠杆.
2.答案:C.
解析:结合图片和生活经验分析动力臂和阻力臂的大小关系,当动力臂大于阻力臂时,是省力杠杆;当动力臂小于阻力臂时,是费力杠杆;当动力臂等于阻力臂时,是等臂杠杆.
A.筷子在使用过程中,动力臂小于阻力臂,是费力杠杆;
B.镊子在使用过程中,动力臂小于阻力臂,是费力杠杆;
C.起子在使用过程中,动力臂大于阻力臂,是省力杠杆;
D.托盘天平在使用过程中,动力臂等于阻力臂,是等臂杠杆.
3.答案:A.
则FA=0.5N×2=1N,LA=1cm×2=2cm,FB=0.5N,LB=1cm×4=4cm;
所以FA×LA=FB×LB
(2)在A、B两处再各加挂一个50g的钩码后,FA′=0.5N×3=1.5N,FB′=0.5N×2=1N,LA和LB的长度都不变,
则FA′×LA=1.5N×2cm=3N•cm,FB′×LB=1N×4cm=4N•cm
因为FA′×LA<FB′×LB
所以杠杆右边下倾.
4.答案:D
解析:根据杠杆平衡条件,F1×l1=F2×l2,根据动力臂和阻力臂的关系分析是省力杠杆、等臂杠杆、费力杠杆.
根据匀速吊起货物时,阻力不变,阻力臂变化,动力臂不变,再次利用杠杆平衡条件进行判断支持力的大小变化.
A.如图画出动力臂和阻力臂,动力臂L1小于阻力臂L2,根据杠杆平衡条件,动力大于阻力,吊臂是费力杠杆.故A错误;
B.吊臂是费力杠杆,费力但可以省距离,但不省功,故B错;
由题知,吊车工作时它对吊臂的支持力始终与吊臂垂直,动力臂不变,阻力不变,阻力臂减小,根据F1×l1=F2×l2可知动力减小,所以伸缩撑杆的支持力逐渐变小.故C错、D正确.
点评:正确确定动力、动力臂、阻力、阻力臂是解决本题的关键,吊车吊起货物时,确定变化量和不变量,根据杠杆平衡条件解决问题
二、填空题
1.答案:40;减少.
当锯掉BC后,杠杆重力变为原来的,力臂变为AB;
由由杠杆平衡的条件可得: G杠杆×AB=GA×OA;
×40N×AB=GA×AB GA=×40N=60N<120N;因此需要在A端减少物重.
2.答案:2:1;3:1;1:3.
解析:由图可知杠杆左右两边的力臂之比,根据杠杆平衡条件,利用密度的公式列出等式,再进行整理,即可得出两种球的质量和密度关系.
设杠杆的一个小格为L,由图知,杠杆的左边的力臂为4L,右边的力臂为2L,
则杠杆左右两边的力臂之比为=2:1;根据ρ=和杠杆平衡条件可得,(2ρ甲V+ρ乙V)×4L=(ρ甲V+3ρ乙V)×2L,
3ρ甲V=ρ乙V,即1个甲球和1个乙球的质量之比为:3:1;
ρ甲:ρ乙=1:3.
3.答案:A;B.
解析:根据杠杆平衡条件,当阻力和动力臂一定时,阻力臂越短,越省力;
图中的剪刀将布放在剪刀的A处,使动力臂小于阻力臂,是费力杠杆,但省距离;
图中剪刀在使用过程中,在同样的情况下,往剪刀转动轴靠近,减小了阻力臂,由F1L1=F2L2可知:阻力臂L2越小,越省力,故应放在B处。
4.答案:后轮;省力.
解析:杠杆绕着转动的固定点叫支点;判断婴儿车属于哪种类型的杠杆,只要知道动力臂和阻力臂的大小关系即可.
当前轮遇到障碍物时向下按扶把时,婴儿车绕后轮转动,所以后轮是支点;
当后轮遇到障碍物时向上抬起扶把,婴儿车绕前轮转动,所以前轮是支点,这时动力臂大于阻力臂是省力杠杆。
5.答案:10,10.
三、作图题
1.解析:本题考查杠杆五要素中动力臂和阻力臂的画法。画力臂时必须注意力臂是“支点到力的作用线的距离”,而不是“支点到力的作用点的距离”。力的作用线是通过力的作用点并沿力的方向所画的直线。
答案:从支点向F1、F2的作用线引垂线,垂线段的长度即为力臂l1、l2,如图所示。
点拨:画力臂可以按“找点、画线、作垂线、标符号”这样的步骤完成。“找点”──找支点。由题意知,杠杆的支点是O。“画线”──画出力的作用线。将F1,F2分别向两端延长,变为一条直线,就是力的作用线。“作垂线”──从支点O向力的作用线画垂线,支点到垂足的距离就是力臂。“标符号”──把支点到垂足的距离用大括号或带箭头的线段勾出,在旁边标上l1,l2。
2.解析:由杠杆平衡的条件知,当阻力与阻力的力臂的积为定值时,动力臂最大时,动力是最小的,此时的动力臂是支点到动力的作用点的距离.根据杠杆的平衡条件,动力F1最小时,其力臂最长,即从支点到动力作用点的距离OA最长;在A点做力臂OA的垂线,方向向上,即为最小动力F1,OA的长度即为该力的力臂,如图所示:
.
3.答案:见解析所示
解析:如图,阻力为由于物体的重而产生的拉力,所以从B点竖直向下画出F2;
力臂为支点到力的作用线的距离,所以从O点向F2作垂线,垂线段即为力臂L2,如图:
点睛:重点是杠杆上的力和力臂的画法,注意阻力F2,千万不要画成物体的重力,阻力和重力是两码事,阻力是物体对杠杆的拉力,所以方向和大小与物体重力相同,但作用点不同。
4.答案:见解析。
[
四、实验探究题
1.答案:(1)水平;(2)1;变大.
解析:(1)杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂,同时杠杆的重心通过支点,消除杠杆自重对杠杆平衡的影响.所以杠杆在水平位置平衡,可以使实验简单化.
(2)∵F1l1=F2l2,
即:F1×8cm=2N×4cm,∴F1=1N.
弹簧测力计竖直向上拉杠杆时,动力臂是OB,当弹簧测力计倾斜拉杠杆时,动力臂是OD,动力臂减小,阻力和阻力臂不变,动力会变大.
五、计算题
答案:(1)700N(2)300N(3)10000Pa
点评:本题考查重力公式应用、杠杆平衡条件应用、压强公式应用。本题关键是由力的平衡条件方程F拉×BO=F×OC,注意BC=3BO F=150N 求出绳对杠杆B端的拉力F拉。本题难点是物体A对地面的压力的求解。这里要知道放在地面的静止的物体,其受到向上的力之和等于其重力,即F+N=G,意思是物体A受到绳向上的拉力F加上地面对物体A相上的支持力N等于物体A的重力。这里F=F拉-N=F压-N求出来,物体A对地面压力F压可求,根据压强公式顺利求解物体A对地面的压强p。
一、学习目标
1.认识杠杆。
2.会画力臂。
3.通过探究,了解杠杆的平衡条件。
4.理解杠杆的平衡条件,知道三种杠杆的概念、特点及应用。
学习重点是了解杠杆的平衡条件。
学习难点是画力臂。
二、知识点解读
知识点一:杠杆
1.杠杆:在力的作用下能绕着固定点转动的硬棒就是杠杆。
2.杠杆的五要素:①支点:杠杆绕着转动的固定点(O);②动力:使杠杆转动的力(F1);③阻力:阻碍杠杆转动的力(F2);④动力臂:从支点到动力作用线的距离(L1); ⑤阻力臂:从支点到阻力作用线的距离(L2)。
3.力臂的画法:①找出支点,②画出力的作用线,③过支点作力的作用线的垂线。④用大括号把垂线段括起来,并标上力臂的符号。
知识点二:杠杆的平衡条件
1.杠杆的平衡:当有两个力或几个力作用在杠杆上时,杠杆能保持静止或匀速转动 ,则我们说杠杆平衡。
2.杠杆平衡的条件:动力乘以动力臂等于阻力乘以阻力臂,即公式:F1L1=F2L2
知识点三:生活中的杠杆
1.省力杠杆:动力臂大于阻力臂的杠杆,省力但费距离。
2.费力杠杆:动力臂小于阻力臂的杠杆,费力但省距离。
3.等臂杠杆:动力臂等于阻力臂的杠杆,既不省力也不费力。
三、深化理解知识点的例题及其解析
【例题1】如图所示为钓鱼竿钓鱼的示意图,O为支点,画F1、F2的力臂L1和L2。
答案如图所示:
【例题2】小明在“研究杠杆平衡条件”的实验中所用的实验器材有,刻度均匀的
杠杆,支架,弹簧测力计,刻度尺,细线和质量相同的0.5N重的钩码若干个。
(1)如图A所示,实验前,杠杆左侧下沉,则应将左端的平衡螺母向 (选
填“左”或”右”)调节,直到杠杆在 位置平衡,目的是便于测量 ,支点在杠杆的中点是为了消除杠杆 对平衡的影响。
小明同学所在实验小组完成某次操作后,实验象如图B所示,他们记录的数据为动力F1=1.5N,动力臂L1=0.1m,阻力F2=1N,则阻力臂L2= m。
(3)甲同学测出了一组数据后就得出了”动力×动力臂=阻力×阻力臂”的结论,
乙同学认为他的做法不合理,理由是 。
(4)丙同学通过对数据分析后得出的结论是:动力×支点到动力作用点的距离=
阻力×支点到阻力作用点的距离,与小组同学交流后,乙同学为了证明丙同学的
结论是错误的,他做了如图C的实验,此实验 (选填“能”或”不能”)说
明该结论是错误的,图C实验中,已知杠杆上每个小格长度为5cm,每个钩码
重0.5N,当弹簧测力计在A点斜向上拉(与水平方向成30°角)杠
杆,使杠杆在水平位置平衡时,动力×动力臂 (选填“等于”或“不等于”)
阻力×阻力臂”。
答案:(1)右;水平;力臂;自重;(2)0.15;(3)一组实验数据太少,具有偶然性,不便找出普遍规律;(4)能;等于。
作用点的距离,与小组同学交流后,乙同学为了证明丙同学的结论是错误的,他做了如图C的实验,此实验能得到“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”,这个结论是不正确的;当动力臂不等于支点到动力作用点的距离时,看实验结论是否成立,所以利用图C进行验证;杠杆平衡条件为:F1L1=F2L2。由杠杆平衡条件得:4×0.5N×3×5cm=3N××4×5cm,左右相等,杠杆在水平位置平衡时,动力×动力臂 等于阻力×阻力臂”。
四、本节课的课时作业(含答案与解析)
第1节 《杠杆》课外同步课时作业
一、选择题
1.踮脚是一项很好的有氧运动(如图),它简单易学,不受场地的限制,深受广大群众的喜爱,踮脚运动的基本模型是杠杆,下列分析正确的是( )
A.脚后跟是支点,是省力杠杆
B.脚后跟是支点,是费力杠杆
C.脚掌与地面接触的地方是支点,是省力杠杆
D.脚掌与地面接触的地方是支点,是费力杠杆
2.如图所示的四种情景中,所使用的杠杆为省力杠杆的是( )
A.用餐工具筷子B.茶道中使用的镊子
C.用起子起瓶盖D.托盘天平
3.如图所示,在均匀杠杆的A处挂3个钩码,B处挂2个钩码,杠杆恰好在水平位置平衡,已知每个钩码的质量均为50g,若在A,B两处各加1个钩码,那么杠杆( )
A.右边向下倾斜B.左边向下倾斜
C.仍保持水平位置平衡D.无法确定杠杆是否平衡
4.如图甲是吊车起吊贷物的结构示意图,伸缩撑杆为圆弧状,工作时它对吊臂的支持力始终与吊臂垂直,使吊臂绕O点缓慢转动,从而将货物提起.图乙杠杆受力及其力臂图示。下列说法正确的是 ( )
A.吊臂是一省力杠杆,但要费距离
B.吊臂是一个费力杠杆,但可以省功
C.匀速顶起吊臂的过程中,伸缩撑杆支持力的力臂变小
D.匀速顶起吊臂的过程中,伸缩撑杆支持力渐渐变小
二、填空题
1.如图所示,一根粗细均匀的硬棒AB被悬挂起来,已知AB=8AO,当在A处悬挂120N的重物G时,杠杆恰好平衡,杠杠自身的重力为 N,若在C处锯掉BC,留下AC杠杠,支点O不变,则需要在A端 (选填“增加”或“减少”)重物,才能使杠杠仍保持水平平衡.
2.如图所示,由不同物质制成的甲和乙两种实心球的体积相等,此时杠杆平衡(杠杆自重、挂盘和细线的质量忽略不计),则杠杆左右两边的力臂之比为 ,1个甲球和1个乙球的质量之比为 ,甲球和乙球的密度之比为 .
3.小明用一把缝衣剪刀剪布,如图所示,他为了省距离应将布放在剪刀的 处,为了省力应将布放在剪刀的 处(填A或B).
4.如图所示,一位母亲推着婴儿车行走,当前轮遇到障碍物时,母亲向下按扶把,若把婴儿车视为杠杆,这时杠杆的支点是 ;当后轮遇到障碍物时,母亲向上抬起扶把,这时婴儿车可视为 杠杆(填“省力”或“费力”).
5.如图所示,一轻质杠杆水平支在支架上,OA=20cm,G1是边长为5cm的正方体,G2重为20N. 当OC=l0cm时,绳子的拉力为_____N,此时G1对地面的压强为2×104Pa. 现用一水平拉力使G2以5cm/s的速度向右匀速直线运动,经过______s后,可使G1对地面的压力恰好为零.
三、作图题
1.试画出力F1、F2的力臂。
2.如图,请在杠杆A处画出把物体拉起时的最小拉力F1,并画出拉力F1的力臂L1.
3.如图所示,杠杆OA在动力F1作用下处于静止状态,请你画出阻力F2及阻力臂L2.
4.如图所示,轻质杠杆OA能绕O点转动,请在杠杆中的A端画出使轻质杠杆保持平衡的最小的力F的示意图(要求保留作图痕迹)。
四、实验探究题
1.某同学做探究杠杆平衡条件的实验.
(1)实验时,为了方便对力臂的测量,该同学先调节平衡螺母,使杠杆在 位置平衡;通过多次实验,该同学得到了杠杆的平衡条件.
(2)实验中,在杠杆上的A点挂四个重均为0.5N的钩码,用调好的弹簧测力计竖直向上拉杠杆上的B点,使杠杆水平平衡,如图所示,测力计的示数是 N;如果将测力计沿图中虚线方向拉,仍使杠杆在水平位置平衡,则测力计的示数将 (变大/不变/变小).
五、计算题
1.如图所示,质量为70kg,边长为20cm的正方体物块A置于水平地面上,通过绳系于轻质杠杆BOC的B端,杠杆可绕O点转动,且BC=3BO。在C端用F=150N的力竖直向下拉杠杆,使杠杆在水平位置平衡,且绳被拉直:(绳重不计,g取10N/kg)求:
(1)物体A的重力G;
(2)绳对杠杆B端的拉力F拉;
(3)此时物体A对地面的压强p。
第1节 《杠杆》课外同步课时作业答案与解析
一、选择题
1.答案:C.
知动力臂大于阻力臂,是省力杠杆.
2.答案:C.
解析:结合图片和生活经验分析动力臂和阻力臂的大小关系,当动力臂大于阻力臂时,是省力杠杆;当动力臂小于阻力臂时,是费力杠杆;当动力臂等于阻力臂时,是等臂杠杆.
A.筷子在使用过程中,动力臂小于阻力臂,是费力杠杆;
B.镊子在使用过程中,动力臂小于阻力臂,是费力杠杆;
C.起子在使用过程中,动力臂大于阻力臂,是省力杠杆;
D.托盘天平在使用过程中,动力臂等于阻力臂,是等臂杠杆.
3.答案:A.
则FA=0.5N×2=1N,LA=1cm×2=2cm,FB=0.5N,LB=1cm×4=4cm;
所以FA×LA=FB×LB
(2)在A、B两处再各加挂一个50g的钩码后,FA′=0.5N×3=1.5N,FB′=0.5N×2=1N,LA和LB的长度都不变,
则FA′×LA=1.5N×2cm=3N•cm,FB′×LB=1N×4cm=4N•cm
因为FA′×LA<FB′×LB
所以杠杆右边下倾.
4.答案:D
解析:根据杠杆平衡条件,F1×l1=F2×l2,根据动力臂和阻力臂的关系分析是省力杠杆、等臂杠杆、费力杠杆.
根据匀速吊起货物时,阻力不变,阻力臂变化,动力臂不变,再次利用杠杆平衡条件进行判断支持力的大小变化.
A.如图画出动力臂和阻力臂,动力臂L1小于阻力臂L2,根据杠杆平衡条件,动力大于阻力,吊臂是费力杠杆.故A错误;
B.吊臂是费力杠杆,费力但可以省距离,但不省功,故B错;
由题知,吊车工作时它对吊臂的支持力始终与吊臂垂直,动力臂不变,阻力不变,阻力臂减小,根据F1×l1=F2×l2可知动力减小,所以伸缩撑杆的支持力逐渐变小.故C错、D正确.
点评:正确确定动力、动力臂、阻力、阻力臂是解决本题的关键,吊车吊起货物时,确定变化量和不变量,根据杠杆平衡条件解决问题
二、填空题
1.答案:40;减少.
当锯掉BC后,杠杆重力变为原来的,力臂变为AB;
由由杠杆平衡的条件可得: G杠杆×AB=GA×OA;
×40N×AB=GA×AB GA=×40N=60N<120N;因此需要在A端减少物重.
2.答案:2:1;3:1;1:3.
解析:由图可知杠杆左右两边的力臂之比,根据杠杆平衡条件,利用密度的公式列出等式,再进行整理,即可得出两种球的质量和密度关系.
设杠杆的一个小格为L,由图知,杠杆的左边的力臂为4L,右边的力臂为2L,
则杠杆左右两边的力臂之比为=2:1;根据ρ=和杠杆平衡条件可得,(2ρ甲V+ρ乙V)×4L=(ρ甲V+3ρ乙V)×2L,
3ρ甲V=ρ乙V,即1个甲球和1个乙球的质量之比为:3:1;
ρ甲:ρ乙=1:3.
3.答案:A;B.
解析:根据杠杆平衡条件,当阻力和动力臂一定时,阻力臂越短,越省力;
图中的剪刀将布放在剪刀的A处,使动力臂小于阻力臂,是费力杠杆,但省距离;
图中剪刀在使用过程中,在同样的情况下,往剪刀转动轴靠近,减小了阻力臂,由F1L1=F2L2可知:阻力臂L2越小,越省力,故应放在B处。
4.答案:后轮;省力.
解析:杠杆绕着转动的固定点叫支点;判断婴儿车属于哪种类型的杠杆,只要知道动力臂和阻力臂的大小关系即可.
当前轮遇到障碍物时向下按扶把时,婴儿车绕后轮转动,所以后轮是支点;
当后轮遇到障碍物时向上抬起扶把,婴儿车绕前轮转动,所以前轮是支点,这时动力臂大于阻力臂是省力杠杆。
5.答案:10,10.
三、作图题
1.解析:本题考查杠杆五要素中动力臂和阻力臂的画法。画力臂时必须注意力臂是“支点到力的作用线的距离”,而不是“支点到力的作用点的距离”。力的作用线是通过力的作用点并沿力的方向所画的直线。
答案:从支点向F1、F2的作用线引垂线,垂线段的长度即为力臂l1、l2,如图所示。
点拨:画力臂可以按“找点、画线、作垂线、标符号”这样的步骤完成。“找点”──找支点。由题意知,杠杆的支点是O。“画线”──画出力的作用线。将F1,F2分别向两端延长,变为一条直线,就是力的作用线。“作垂线”──从支点O向力的作用线画垂线,支点到垂足的距离就是力臂。“标符号”──把支点到垂足的距离用大括号或带箭头的线段勾出,在旁边标上l1,l2。
2.解析:由杠杆平衡的条件知,当阻力与阻力的力臂的积为定值时,动力臂最大时,动力是最小的,此时的动力臂是支点到动力的作用点的距离.根据杠杆的平衡条件,动力F1最小时,其力臂最长,即从支点到动力作用点的距离OA最长;在A点做力臂OA的垂线,方向向上,即为最小动力F1,OA的长度即为该力的力臂,如图所示:
.
3.答案:见解析所示
解析:如图,阻力为由于物体的重而产生的拉力,所以从B点竖直向下画出F2;
力臂为支点到力的作用线的距离,所以从O点向F2作垂线,垂线段即为力臂L2,如图:
点睛:重点是杠杆上的力和力臂的画法,注意阻力F2,千万不要画成物体的重力,阻力和重力是两码事,阻力是物体对杠杆的拉力,所以方向和大小与物体重力相同,但作用点不同。
4.答案:见解析。
[
四、实验探究题
1.答案:(1)水平;(2)1;变大.
解析:(1)杠杆在水平位置平衡,力臂在杠杆上,便于测量力臂,同时杠杆的重心通过支点,消除杠杆自重对杠杆平衡的影响.所以杠杆在水平位置平衡,可以使实验简单化.
(2)∵F1l1=F2l2,
即:F1×8cm=2N×4cm,∴F1=1N.
弹簧测力计竖直向上拉杠杆时,动力臂是OB,当弹簧测力计倾斜拉杠杆时,动力臂是OD,动力臂减小,阻力和阻力臂不变,动力会变大.
五、计算题
答案:(1)700N(2)300N(3)10000Pa
点评:本题考查重力公式应用、杠杆平衡条件应用、压强公式应用。本题关键是由力的平衡条件方程F拉×BO=F×OC,注意BC=3BO F=150N 求出绳对杠杆B端的拉力F拉。本题难点是物体A对地面的压力的求解。这里要知道放在地面的静止的物体,其受到向上的力之和等于其重力,即F+N=G,意思是物体A受到绳向上的拉力F加上地面对物体A相上的支持力N等于物体A的重力。这里F=F拉-N=F压-N求出来,物体A对地面压力F压可求,根据压强公式顺利求解物体A对地面的压强p。
相关学案
人教版八年级下册12.1 杠杆导学案: 这是一份人教版八年级下册<a href="/wl/tb_c77673_t4/?tag_id=42" target="_blank">12.1 杠杆导学案</a>,共9页。学案主要包含了学习目标,学习重点,学习难点,自主预习,合作探究,精讲点拨,归纳整理,当堂练习等内容,欢迎下载使用。
初中物理人教版八年级下册12.1 杠杆学案及答案: 这是一份初中物理人教版八年级下册12.1 杠杆学案及答案,共4页。学案主要包含了学习目标,学习过程,课堂反思等内容,欢迎下载使用。
人教版八年级下册11.2 功率导学案: 这是一份人教版八年级下册11.2 功率导学案,共7页。学案主要包含了学习目标,知识点解读,深化理解知识点的例题及其解析,本节课的课时作业等内容,欢迎下载使用。