还剩11页未读,
继续阅读
所属成套资源:新闽教版信息技术六年级下册课件PPT全套
成套系列资料,整套一键下载
小学闽教版(2020)第7课 仿真机器人避障精品ppt课件
展开
这是一份小学闽教版(2020)第7课 仿真机器人避障精品ppt课件,共19页。PPT课件主要包含了学习任务,开阔视野,家用扫地机器人,早期的扫地机,探究活动,编写仿真程序,RC编程软件的主界面,“条件判断”模块,仿真测试机器人,1超声波传感器等内容,欢迎下载使用。
1.了解红外避障传感器的组成。2.分析扫地机器人的行走规律。3.编写程序,在虚拟环境中模拟扫地机器人躲避障碍行走。
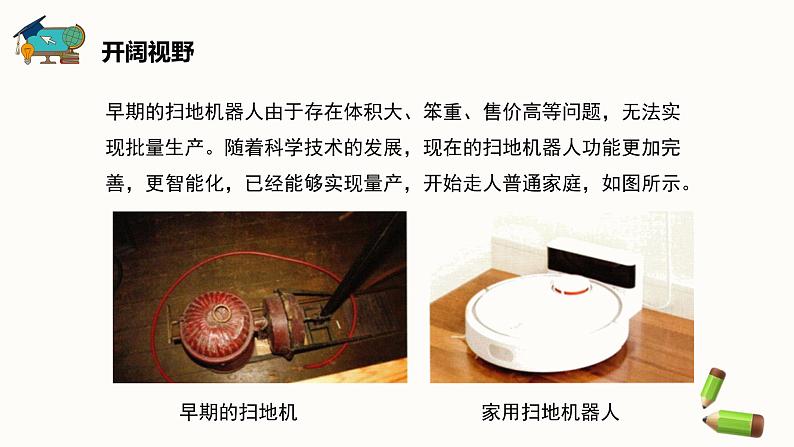
早期的扫地机器人由于存在体积大、笨重、售价高等问题,无法实现批量生产。随着科学技术的发展,现在的扫地机器人功能更加完善,更智能化,已经能够实现量产,开始走人普通家庭,如图所示。
与早期的扫地机器人相比,现在的扫地机器人更加智能,躲避障碍的能力也更强。
活动主题:在仿真环境中模拟机器人躲避障碍行走
想让机器人避开障碍物,首先要让它能看到障碍物。所以我们需要为扫地机器人安装上“眼睛”,使它拥有能看到障碍物的“器官”;然后编写自动躲避障碍的控制程序,让扫地机器人能根据检测到的障碍物情况进行合理避障。
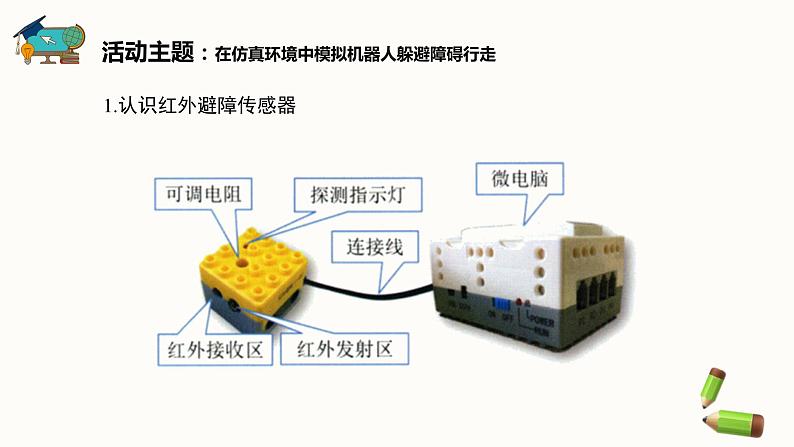
1.认识红外避障传感器
红外线发射区发射的红外线遇到障碍物发生反射,反射的红外线被红外线接收区接收到时,探测指示灯会亮起。此时,红外避障传感器会把发现障碍物的这个信息传输给机器人的微电脑,机器人就知道了障碍物的存在。 通过调节红外避障传感器的可调电阻,可以调节可探测到的障碍物的距离。顺时针调节,探测距离变远;逆时针调节,探测距离变近。
2.扫地机器人的工作情况 扫地机器人拥有了“眼睛”之后,就可以看到障碍物了。在此基础上,还要让扫地机器人在执行任务时一直保持识别、躲避障碍物的状态,直到任务完成。 扫地机器人躲避障碍物的过程可以用示意图表示出来,如图所示。
扫地机器人躲避障碍物的示意图
根据示意图所示,我们在RC软件中,编写指挥仿真扫地机器人执行任务的程序。
(1)启动RC软件,认识程序主界面RC软件主界面如图所示,由菜单栏、工具栏、模块库、流程图生成区、状态栏等部分组成。
红外避障变量1、2、3、4,分别对应着仿真状态下机器人的前、左、右、后四个方向。
(2)添加“永久循环”及“红外避障”模块
(3)添加“条件判断”模块
(4)添加“转向”和“高速电机”模块
“转向”和“高速电机”模块
单击按钮 ,进入仿真环境,制作一个简单的用于仿真扫地机器人工作的仿真地图环境。
单击工具栏上的“仿真”图标 琴或“3D仿真”图标 ,然后将仿真机器人放入仿真环境中进行测试。
“仿真”和“3D仿真”的仿真效果
现实生活中,有的扫地机器人遇到障碍时,并不会立刻转向,而是会后退一步再转向,这样可以更好地躲避障碍物。修改程序,让仿真扫地机器人以同样的动作躲避障碍物。
如果有实体机器人,可以用下载线将机器人与计算机进行连接,点击工具栏中的按钮丛 ,将程序下载到其中。然后将机器人放在周围有障碍物的环境中,打开电源运行即可。
1.了解红外避障传感器的组成。2.分析扫地机器人的行走规律。3.编写程序,在虚拟环境中模拟扫地机器人躲避障碍行走。
早期的扫地机器人由于存在体积大、笨重、售价高等问题,无法实现批量生产。随着科学技术的发展,现在的扫地机器人功能更加完善,更智能化,已经能够实现量产,开始走人普通家庭,如图所示。
与早期的扫地机器人相比,现在的扫地机器人更加智能,躲避障碍的能力也更强。
活动主题:在仿真环境中模拟机器人躲避障碍行走
想让机器人避开障碍物,首先要让它能看到障碍物。所以我们需要为扫地机器人安装上“眼睛”,使它拥有能看到障碍物的“器官”;然后编写自动躲避障碍的控制程序,让扫地机器人能根据检测到的障碍物情况进行合理避障。
1.认识红外避障传感器
红外线发射区发射的红外线遇到障碍物发生反射,反射的红外线被红外线接收区接收到时,探测指示灯会亮起。此时,红外避障传感器会把发现障碍物的这个信息传输给机器人的微电脑,机器人就知道了障碍物的存在。 通过调节红外避障传感器的可调电阻,可以调节可探测到的障碍物的距离。顺时针调节,探测距离变远;逆时针调节,探测距离变近。
2.扫地机器人的工作情况 扫地机器人拥有了“眼睛”之后,就可以看到障碍物了。在此基础上,还要让扫地机器人在执行任务时一直保持识别、躲避障碍物的状态,直到任务完成。 扫地机器人躲避障碍物的过程可以用示意图表示出来,如图所示。
扫地机器人躲避障碍物的示意图
根据示意图所示,我们在RC软件中,编写指挥仿真扫地机器人执行任务的程序。
(1)启动RC软件,认识程序主界面RC软件主界面如图所示,由菜单栏、工具栏、模块库、流程图生成区、状态栏等部分组成。
红外避障变量1、2、3、4,分别对应着仿真状态下机器人的前、左、右、后四个方向。
(2)添加“永久循环”及“红外避障”模块
(3)添加“条件判断”模块
(4)添加“转向”和“高速电机”模块
“转向”和“高速电机”模块
单击按钮 ,进入仿真环境,制作一个简单的用于仿真扫地机器人工作的仿真地图环境。
单击工具栏上的“仿真”图标 琴或“3D仿真”图标 ,然后将仿真机器人放入仿真环境中进行测试。
“仿真”和“3D仿真”的仿真效果
现实生活中,有的扫地机器人遇到障碍时,并不会立刻转向,而是会后退一步再转向,这样可以更好地躲避障碍物。修改程序,让仿真扫地机器人以同样的动作躲避障碍物。
如果有实体机器人,可以用下载线将机器人与计算机进行连接,点击工具栏中的按钮丛 ,将程序下载到其中。然后将机器人放在周围有障碍物的环境中,打开电源运行即可。
相关课件
六年级下册第12课 机器人的“大脑”一等奖课件ppt: 这是一份六年级下册<a href="/xx/tb_c138102_t3/?tag_id=26" target="_blank">第12课 机器人的“大脑”一等奖课件ppt</a>,共8页。PPT课件主要包含了了解机器人的工作原理,机器人的工作原理,机器人的程序,机器人的工作过程,创新活动等内容,欢迎下载使用。
闽教版(2020)六年级下册第二单元 人工智能基础:体验机器人编程第7课 仿真机器人避障完美版ppt课件: 这是一份闽教版(2020)六年级下册第二单元 人工智能基础:体验机器人编程第7课 仿真机器人避障完美版ppt课件,共33页。PPT课件主要包含了新知学习,活动任务,任务内容,任务说明,任务分析,探究活动,检测仪的硬件组成,制作检测仪的器材,检测仪的工作原理,成员分工表等内容,欢迎下载使用。
闽教版(2020)六年级下册第9课 仿真光控节能灯优质课ppt课件: 这是一份闽教版(2020)六年级下册第9课 仿真光控节能灯优质课ppt课件,共17页。PPT课件主要包含了学习任务,开阔视野,探究活动,设置判断数值,测试脚本,LED点阵屏显示情况,创新活动,活动评价等内容,欢迎下载使用。