
所属成套资源:电子工业版(宁夏)信息技术六下课件PPT全册
信息技术六年级下册第2单元 搭建机器人一、构建机器人部件评优课ppt课件
展开
这是一份信息技术六年级下册第2单元 搭建机器人一、构建机器人部件评优课ppt课件,共19页。PPT课件主要包含了构建机器人部件,课堂小结等内容,欢迎下载使用。
教学目标: 1、会构建机器人部件 2、会安装机器人的安装块
教学重难点: 1、能选择正确的安装块 2、安装块与安装块之间的安装点的选择
机器人是由一个个零部件组装而成的,不论是仿真环境还是真实实验,IRbtQ3D给我们提供的都是一些最基本的基础零部件。因此,在具体任务中,需要根据任务要求,现将基础零部件构建(组装)成需要的机器人部件。在IRbtQ3D的机器人编辑窗口,可以完成机器人部件的构建,完成后保存为“模板”,在搭建机器人时可以直接使用。
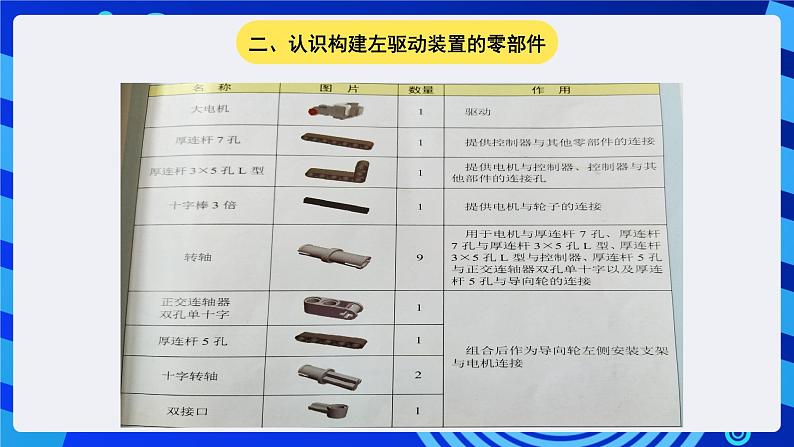
二、认识构建左驱动装置的零部件
第1步:登录IrbtQ3D,在仿真大厅工具栏中单击“本地模式”按钮进入仿真平台,然后单击“构建机器人”打开“选择智能界面”,选择“Rbkid”后单击打开Rbkid机器人编辑窗口。
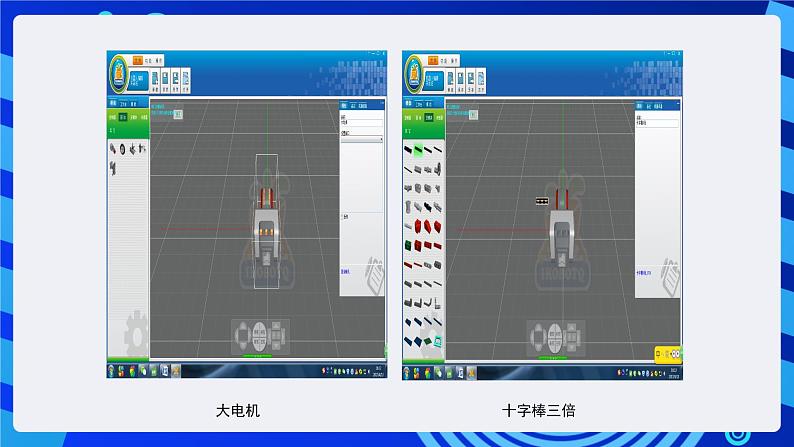
第2步:单击模型库的“模型”面板中的“驱动”,在“驱动”模型列表中选择“大电机”,将鼠标指针移到编辑区绿色与红色坐标线相交处单击,把“大电机”放到编辑区中;单击“模型”面板中的“安装块”,在“安装块”模型列表中选择“十字棒3倍”,放置到编辑区“大电机”左侧,(如下图)
三、构建左驱动装置的步骤
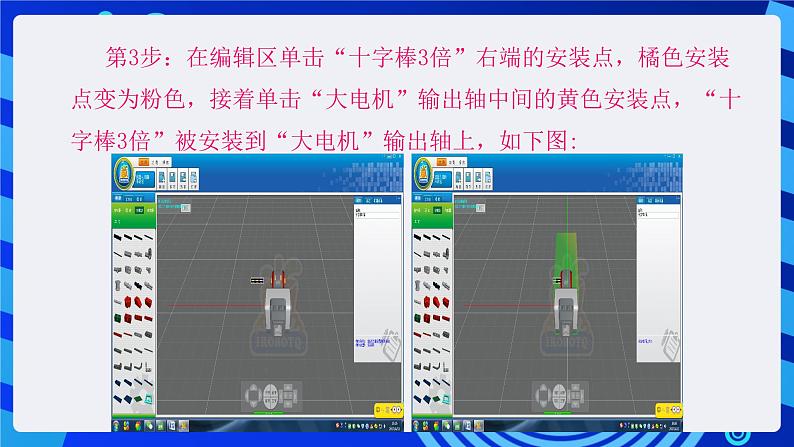
第3步:在编辑区单击“十字棒3倍”右端的安装点,橘色安装点变为粉色,接着单击“大电机”输出轴中间的黄色安装点,“十字棒3倍”被安装到“大电机”输出轴上,如下图:
第4步:在“安装块”模型列表中,分别选择2次“转轴”和1次“厚连杆7孔”,依次添加到编辑区“大电机”右侧;在编辑区单击“大电机”,按下鼠标右键向左拖动,显示“大电机”右侧;然后参照第3步,分别将2个“转轴”依次安装到“大电机”顶端两个安装点中;最后,将“厚连杆7孔”右前方安装到“大电机”顶端左数第一个“转轴”上。(如下图)
第5步:在“安装块”模型列表中,分别选择4次“转轴”和1次“厚连杆3*5孔L型”,依次添加到编辑区。将其中2个“转轴”分别安装到“厚连杆7孔”右数第1和第3个安装孔中,再将“厚连杆3*5孔L型”拐角处安装孔与“厚连杆7孔”右数第2个转轴连接,接着按3次空格键,使“厚连杆3*5孔L型”长杆转270度后安装到“厚连杆7孔”上;最后,将剩下的2个“转轴”分别安装到“厚连杆3*5孔L型”上数第1和第3个安装孔中。(如下图)
第6步:在“安装块”模型列表中,分别选择2次“十字转轴”3次“转轴”以及“双接口”、“正交连轴器双孔单十字”“厚连杆5孔”各1次,依次添加到编辑区,
第7步:在编辑区单击“大电机”,按一次空格键,使“大电机”转过90度显示尾部三个安装孔,依次将一个“十字转轴”圆形安装点安装到“大电机”尾部右数第1个安装孔中,将“双接口”安装到“十字转轴”的十字安装点上,将另一个“十字转轴”圆形安装点连接到“双接口”上方安装点上,将“正交连轴器双孔单十字”的十字安装孔安装到“十字转轴”的十字安装点上,使“正交连轴器双孔单十字”安装到“大电机”外侧。(如下图)
第8步:在编辑区单击“大电机”,按下鼠标右键向左拖动,显示“正交连轴器双孔单十字”右侧安装点,将一个“转轴”安装到“十字转轴”外侧第1个安装孔中,再将“厚连杆5孔”右后第2个安装点与“转轴”连接,然后按1次空格键,让“厚连杆5孔”旋转90度后垂直安装在“正交连轴器双孔单十字”上。(如下图)
第9步:参照第8步操作,分别将剩余的两个“转轴”依次安装到“厚连杆5孔”上数第1、3个安装孔中,再单击“大电机”按3次空格键,让整个部件旋转270度,将编辑区的坐标轴恢复到系统的初始状态,(如下图)
第10步:在编辑区单击“大电机”,然后单击模型库的“模板”标签,在打开的“模板”面板中单击“创建模板”按钮,组合后的部件被添加到模板列表中,最后单击“模板”面板中的“添加备注”按钮,在弹出的列表框中输入“左电机模板”(如下图)
第11步:单击Rbkid机器人编辑区窗口右上角的关闭按钮,返回仿真大厅。
做一做: 为机器人构建一个右驱动装置,并以“右电机模板”为备注,添加到Rbkid机器人编辑窗口的模板中。
1、在IrbtQ3D模型库的模型列表中,将鼠标指针移到某一模型上,系统会给出该模型的名称。 2、如果安装点选择有误,可以按键盘上的“ESC”键取消。 3、 选中模型后按鼠标右键,左右拖动可以切换水平方向的视角,上下拖动可以切换垂直方向的视角。
相关课件
这是一份六年级下册四、学习实践 ——“学习者号”走迷宫获奖ppt课件,共7页。PPT课件主要包含了回顾仿真体验,实验步骤,说说看,小组自我评价表等内容,欢迎下载使用。
这是一份小学信息技术电子工业版(宁夏)六年级下册二、体验IRobotQ3D仿真环境编程精品课件ppt,共8页。PPT课件主要包含了安全出站,分析任务,确定算法,编写程序,仿真调试,1任务分析,2确定算法等内容,欢迎下载使用。
这是一份电子工业版(宁夏)六年级下册第2单元 搭建机器人二、搭建仿真机器人获奖ppt课件,共14页。PPT课件主要包含了模型库,属性面板,机器人编辑区,视角面板,工具分类标签,工具栏,做一做,操作步骤,小博士,试试看等内容,欢迎下载使用。







