
还剩5页未读,
继续阅读
高中教科版1 电子课堂检测
展开
这是一份高中教科版1 电子课堂检测,共8页。试卷主要包含了加权最小二乘法的原理和步骤,PQ分解法与牛顿法的区别和联系,潮流计算与状态估计的区别联系,对电力系统稳态分析的认识等内容,欢迎下载使用。
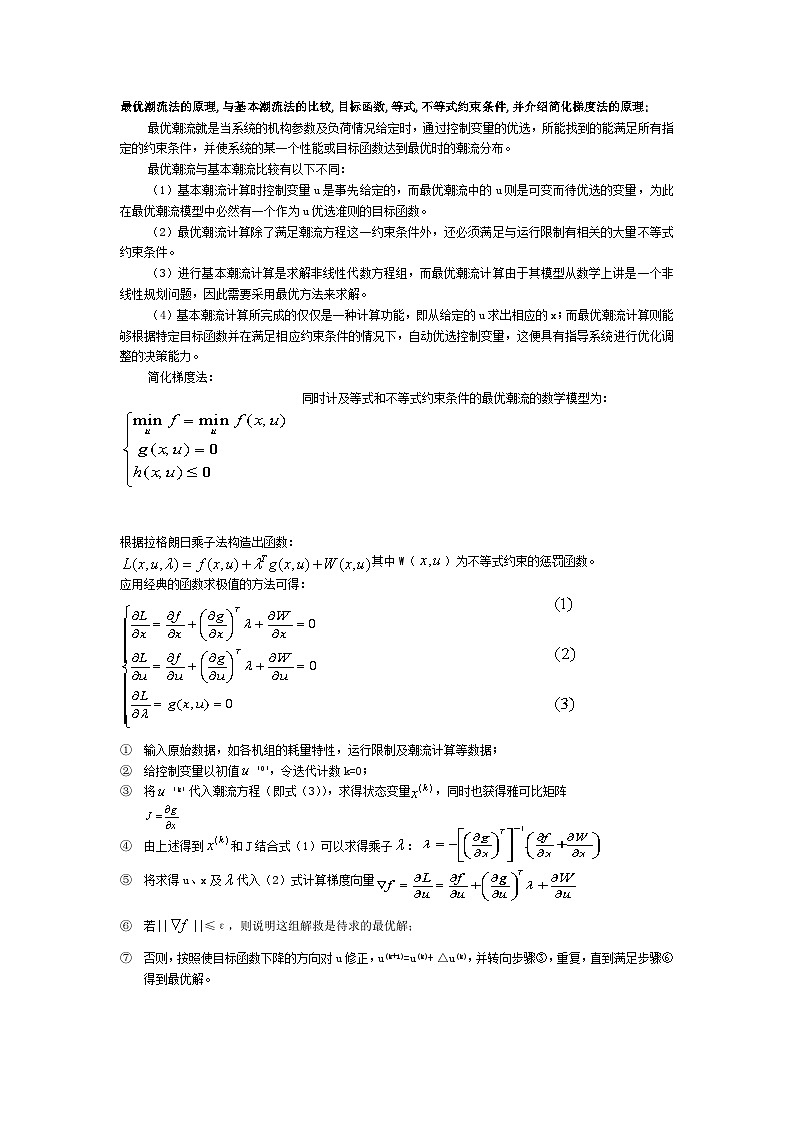
最优潮流与基本潮流比较有以下不同:
(1)基本潮流计算时控制变量u是事先给定的,而最优潮流中的u则是可变而待优选的变量,为此在最优潮流模型中必然有一个作为u优选准则的目标函数。
(2)最优潮流计算除了满足潮流方程这一约束条件外,还必须满足与运行限制有相关的大量不等式约束条件。
(3)进行基本潮流计算是求解非线性代数方程组,而最优潮流计算由于其模型从数学上讲是一个非线性规划问题,因此需要采用最优方法来求解。
(4)基本潮流计算所完成的仅仅是一种计算功能,即从给定的u求出相应的x;而最优潮流计算则能够根据特定目标函数并在满足相应约束条件的情况下,自动优选控制变量,这便具有指导系统进行优化调整的决策能力。
简化梯度法:
同时计及等式和不等式约束条件的最优潮流的数学模型为:
根据拉格朗日乘子法构造出函数:
其中W()为不等式约束的惩罚函数。
应用经典的函数求极值的方法可得:
输入原始数据,如各机组的耗量特性,运行限制及潮流计算等数据;
给控制变量以初值(0),令迭代计数k=0;
将(k)代入潮流方程(即式(3)),求得状态变量 ,同时也获得雅可比矩阵
由上述得到和J结合式(1)可以求得乘子:
将求得u、x及代入(2)式计算梯度向量
若||||≤ε,则说明这组解救是待求的最优解;
否则,按照使目标函数下降的方向对u修正,u(k+1)=u(k)+ △u(k),并转向步骤③,重复,直到满足步骤⑥得到最优解。
最小化潮流算法原理
将潮流问题转化为求使标量函数F(x)为最小值时的x的值问题。根据数学规划方法可有如下:
(1)设一个初值
(2)置k=0 (k为迭代次数)
(3)从 出发,按照能使目标函数下降的原则,确定一个搜索或寻优方向
(4)沿 的方向确定能使目标函数下降得最多的一个点,也就是决定移动的步长,由此得到一个新的迭代点:;其中μ为步长因子,可以通过对F(χ(k+1))对μ求极值而得;
(5)判断F(χ(k+1)) <ε是否成立。若成立,χ(k+1)为所求的解。否则,令k=k+1,转(3),重复循环计算,到满足为止。
关键的两个问题:
(1)如何确定第k次迭代的寻优方向 ;
(2)如何确定第k次迭代的步长因子 。
带有最优乘子的牛顿潮流算法:即数学规划与牛顿法结合
(1)利用常规牛顿潮流算法每次迭代所求出的修正向量作为搜索方向,并称之为目标函数在x(k)处的牛顿方向。
(2)最优步长因子的确定方法:
采用直角坐标的潮流方程的泰勒展开式可以精确的表示为
引入一个标量乘子μ以调节变量x的修正步长,上式可以写为:
在此
令:
于是上式写为:
所以目标函数可以写为:
F(x)对μ求导,并令其等于零:
上式展开可得:
其中: ; ; ;
再利用卡丹公式或者牛顿法就可以求得μ。
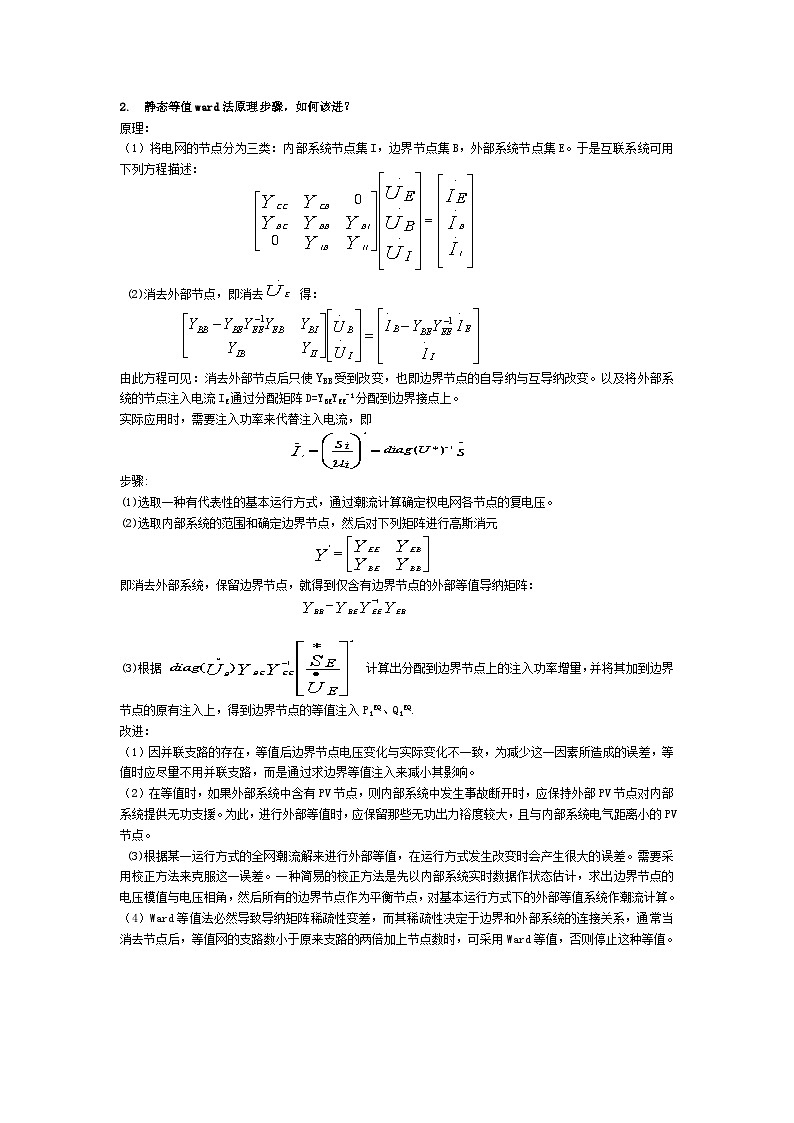
静态等值ward法原理步骤,如何该进?
原理:
(1)将电网的节点分为三类:内部系统节点集I,边界节点集B,外部系统节点集E。于是互联系统可用下列方程描述:
(2)消去外部节点,即消去 得:
由此方程可见:消去外部节点后只使YBB受到改变,也即边界节点的自导纳与互导纳改变。以及将外部系统的节点注入电流IE通过分配矩阵D=YBEYEE-1分配到边界接点上。
实际应用时,需要注入功率来代替注入电流,即
步骤:
(1)选取一种有代表性的基本运行方式,通过潮流计算确定权电网各节点的复电压。
(2)选取内部系统的范围和确定边界节点,然后对下列矩阵进行高斯消元
即消去外部系统,保留边界节点,就得到仅含有边界节点的外部等值导纳矩阵:
(3)根据 计算出分配到边界节点上的注入功率增量,并将其加到边界
节点的原有注入上,得到边界节点的等值注入PiEQ、QiEQ.
改进:
(1)因并联支路的存在,等值后边界节点电压变化与实际变化不一致,为减少这一因素所造成的误差,等值时应尽量不用并联支路,而是通过求边界等值注入来减小其影响。
(2)在等值时,如果外部系统中含有PV节点,则内部系统中发生事故断开时,应保持外部PV节点对内部系统提供无功支援。为此,进行外部等值时,应保留那些无功出力裕度较大,且与内部系统电气距离小的PV节点。
(3)根据某一运行方式的全网潮流解来进行外部等值,在运行方式发生改变时会产生很大的误差。需要采用校正方法来克服这一误差。一种简易的校正方法是先以内部系统实时数据作状态估计,求出边界节点的电压模值与电压相角,然后所有的边界节点作为平衡节点,对基本运行方式下的外部等值系统作潮流计算。
(4)Ward等值法必然导致导纳矩阵稀疏性变差,而其稀疏性决定于边界和外部系统的连接关系,通常当消去节点后,等值网的支路数小于原来支路的两倍加上节点数时,可采用Ward等值,否则停止这种等值。
4.保留非线性快速潮流算法原理,与牛顿法比较?
原理: 牛顿法求解非线性方程时采用了逐次线性化的方法,实际上是忽略了泰勒级数的高阶项,而保留非线性快速潮流算法缺考虑了泰勒级数的二阶项。
潮流方程组:
Y(x)在初值x(0)附近展开成没有截断误差的式子:
其中: 为修正量向量
研究表明上式可以写成:
从而得出迭代方程为:
经过迭代最终满足迭代判据要求。
与牛顿法比较:
牛顿法迭代公式为:
而保留非线性法迭代公式为:
(1)迭代过程中:牛顿法的雅可比矩阵变化,而保留非线性快速朝流算法的雅可比矩阵恒定;
(2)迭代计算量:每次迭代牛顿法要重新计算y(x(k)),而保留非线性快速潮流算法则要计算y(Δx(k)),由于计算函数式完全相同,仅变量不同,所以这部分的计算量是完全相同的,但由于保留非线性快速潮流算法不需要重新形成雅可比矩阵并三角分解,所以迭代所需时间大大节省。
(3)Δx含义不同:牛顿法的Δx(k)是相对于上一次迭代所得到的迭代点x(k)的修正量;而保留非线性快速朝流算法的Δx(k)则是相对于始终不变的初始值x(0)的修正量;
(4) 保留非线性快速朝流算法达到收敛所需的迭代次数要比牛顿法多,但由于每次迭代所需计算量比牛顿法省很多,所以总的计算速度比牛顿法可提高很多。
(5)由于不具对程性的雅可比矩阵三角分解后,其上下三角元素都需要保存,而牛顿法一种方法只需要保存上三角元素,因此,此算法的矩阵存储量要比牛顿法增加35%—40% 。
(6)初始值的选择对保留非线性快速潮流法的收敛性有很大影响。
5.不良数据的检测与辨识方法?并选择一种方法介绍其原理?
不良数据的检测是用来判定是否存在不良数据。通常有三种方法:①检测法;②加权残差检测法(法);③标准化残差检测法(法)。
辨识是为了寻找出哪一个数据是不良数据,以便进行剔除或补充。常用的方法有:残差搜索辨识法,估计辨识法,非二次准则辨识法等。
检测法原理:
①先假定电力系统没有不良数据存在,此时记加权残差为,加权测量误差为,则目标函数为:
k为测量冗余度。
当k>30时,
②假设当电力系统的测量中,第i个量是不良数据,且假定其值为,于是测量的误差向量应改写为:
,其中
此时加权测量误差向量可写为:
从而:
则
上式中右端第一项是设有不良数据时目标函数极值,它为k阶自由度的分布;第二项为零均值的正态分布;第三项为常数项,故的统计特性为:
当k>30时,趋于正态分布:
可以看出,当存在不良数据时,目标函数就急剧增大。利用这一特性可以检测不良数据。具体方法是:<r(r为检验阀值),则没有不良数据,否则有。
6. 电力系统中谐波产生的原因,并说明其分析方法
原因:非线性负荷从电网中吸收非线性正弦电流,引起电网电压畸变,电网中的谐波主要来源于非线性负载,我们可以把谐波分为三种:
①稳定性谐波:产生谐波成分和幅值基本上不变。如:电网电压稳定时的变压器铁芯非线性产生的谐波,带稳定负载的整流器等。
②动态性谐波源:产生谐波具有明显的随机性。如:电弧炉,电气机车等。
③突发性谐波源:这种谐波只有在特定的条件下产生。如:变压器空载合闸励磁涌流及投入电容器时的暂态过程是典型的突发性谐波源。
危害:
①会使发电机、变压器、电动机、补偿电容器等产生附加热效应。
②对电网运行会增加无功损耗,引起共振。
③会使一些电气设备产生机械振动。
④会使继电器动作失误,增加测量表计的测量误差。
⑤会造成某些自动装置工作不正常,引起通讯干扰。
⑥使家用电器工况变坏等。
分析方法:
①线性分析法:假定谐波源电流大小和相位与基波电流成线性关系。
②非线性频域法:将谐波源的各次谐波表示成相应谐波电压的变量函数并考虑基波潮流与谐波潮流的相互影响,通过两者联立迭代求解。
③非线性时域仿真法:用来分析暂态谐波,它从电网的状态方程出发,把系统和负荷描述成常微分方程,通过解该方程来求解电力系统谐波响应。
抑制方法:
减少谐波源含量;选择合理的供电电压;装设交流滤波器;采用新型保护;加装静止无功补偿装置;改变谐波源的配置或工作方式。
7.加权最小二乘法的原理和步骤
加权最小二乘法的以测量值z与测量估计值平方和最小,并为每一个测量量赋一个权值,精度高权值大,精度低权值小的估计方法。
建立加权最小二乘法的目标函数:
,其中W为加权正定阵。
令,为测量误差方阵。
于是目标函数可写为:
令,可以得到: 得到:
以上是在线性函数前提下讨论的。但在一般情况下h(x)为非线性函数,要采用迭代的方法来求解。先假定状态量初值为x(0),使h(x)在x(0)处线性化,进行泰勒级数在x(0)处展开,最终得出迭代方程为:
;
按照上式迭代修正直到满足收敛判据(使目标函数接近最小)。
经过次迭代得到,即为最优状态估计值。此时测量量的估计值是
步骤:
h(x)是x的非线性函数时,进行状态估计步骤如下:
①从状态量的初值计算测量函数向量和雅可比矩阵;
②由测量量z和计算残差z-和目标函数并由雅可比矩阵
③解上述迭代公式的第一式求取修正量,并取其中绝对值最大者。
④用收敛判据≤ε检测是否达到收敛标准。
⑤若未达到收敛标准,修改状态量,继续进行迭代计算,直到收敛为止。
8.PQ分解法与牛顿法(直角坐标)的区别和联系
联系:
PQ分解法实际上是在牛顿的基础上,利用有功功率的变化主要决定于电压相角的变化,而无功功率的变化主要决定于电压模值,以及线路两端电压相角差,这一特点简化而来,它实现了有功和无功的解耦。
区别:
①PQ分解法用两个几乎减半的方程组(一个n-1阶及一个n-m-1阶)代替牛顿法解一个2n-m-2阶方程组,显著减少了内存需量和计算量。
②不同于牛顿法每次迭代都咬重新形成雅可比矩阵并进行三角分解,PQ法只需一次形成三角分解,为此大打缩短了每次迭代时间。
③雅可比矩阵J不对称,而B’,B’’都是对称的,这样减少了分解计算量并节约了内存。
④快速解耦法跌打次数要比牛顿法多,但是每次迭代所需时间比牛顿法少,所以总的计算速度仍有大幅度提高。
9.潮流计算与状态估计的区别联系
联系: 潮流计算是在已知网络参数及n节点注入量的情况下,求系统的状态量—n节点电压。而状态估计是在有测量噪声的情况下,由m维测量量和网络参数通过估计算法求解系统的状态量—n节点电压。即他们的目的都是求解系统状态量。
区别:
①潮流计算中,方程式的数目=未知量的数目,而状态估计中,因测量量的维数一般大于未知状态向量的维数,亦即方程式的个数多余未知数的个数。
②求解方程不同:潮流计算中,一般用牛—拉法求解2n个非线性方程组,而状态估计则是根据一定的估计准则,按估计理论处理方法求解方程组的。
10.对电力系统稳态分析的认识
电力系统稳态分析是电力系统及其自动化的主要专业课之一,主要包括以下几个方面的内容:
①潮流计算:包括常规算法和规划算法。其中牛顿—拉夫逊法是基础,它是其他一些派生算法的基础,具有快速的收敛性和良好的收敛可靠性。
②状态估计:对有一定冗余度的量测量进行估计计算,得到能表征系统特征的状态变量,包括静态估计和动态估计。其目的在于建立实时数据库,也可用于负荷预报。目前常用的方法有:最小二乘法,支路潮流状态估计,递推状态估计。
③电力系统的静态安全分析:根据系统在发生预想事故后会不会发生过负荷或电压越限来判断系统的安全性。其目的在于:及时将系统从不安全状态通过预防控制换变为安全正常状态。
④电力系统复杂故障分析。
最优潮流与基本潮流比较有以下不同:
(1)基本潮流计算时控制变量u是事先给定的,而最优潮流中的u则是可变而待优选的变量,为此在最优潮流模型中必然有一个作为u优选准则的目标函数。
(2)最优潮流计算除了满足潮流方程这一约束条件外,还必须满足与运行限制有相关的大量不等式约束条件。
(3)进行基本潮流计算是求解非线性代数方程组,而最优潮流计算由于其模型从数学上讲是一个非线性规划问题,因此需要采用最优方法来求解。
(4)基本潮流计算所完成的仅仅是一种计算功能,即从给定的u求出相应的x;而最优潮流计算则能够根据特定目标函数并在满足相应约束条件的情况下,自动优选控制变量,这便具有指导系统进行优化调整的决策能力。
简化梯度法:
同时计及等式和不等式约束条件的最优潮流的数学模型为:
根据拉格朗日乘子法构造出函数:
其中W()为不等式约束的惩罚函数。
应用经典的函数求极值的方法可得:
输入原始数据,如各机组的耗量特性,运行限制及潮流计算等数据;
给控制变量以初值(0),令迭代计数k=0;
将(k)代入潮流方程(即式(3)),求得状态变量 ,同时也获得雅可比矩阵
由上述得到和J结合式(1)可以求得乘子:
将求得u、x及代入(2)式计算梯度向量
若||||≤ε,则说明这组解救是待求的最优解;
否则,按照使目标函数下降的方向对u修正,u(k+1)=u(k)+ △u(k),并转向步骤③,重复,直到满足步骤⑥得到最优解。
最小化潮流算法原理
将潮流问题转化为求使标量函数F(x)为最小值时的x的值问题。根据数学规划方法可有如下:
(1)设一个初值
(2)置k=0 (k为迭代次数)
(3)从 出发,按照能使目标函数下降的原则,确定一个搜索或寻优方向
(4)沿 的方向确定能使目标函数下降得最多的一个点,也就是决定移动的步长,由此得到一个新的迭代点:;其中μ为步长因子,可以通过对F(χ(k+1))对μ求极值而得;
(5)判断F(χ(k+1)) <ε是否成立。若成立,χ(k+1)为所求的解。否则,令k=k+1,转(3),重复循环计算,到满足为止。
关键的两个问题:
(1)如何确定第k次迭代的寻优方向 ;
(2)如何确定第k次迭代的步长因子 。
带有最优乘子的牛顿潮流算法:即数学规划与牛顿法结合
(1)利用常规牛顿潮流算法每次迭代所求出的修正向量作为搜索方向,并称之为目标函数在x(k)处的牛顿方向。
(2)最优步长因子的确定方法:
采用直角坐标的潮流方程的泰勒展开式可以精确的表示为
引入一个标量乘子μ以调节变量x的修正步长,上式可以写为:
在此
令:
于是上式写为:
所以目标函数可以写为:
F(x)对μ求导,并令其等于零:
上式展开可得:
其中: ; ; ;
再利用卡丹公式或者牛顿法就可以求得μ。
静态等值ward法原理步骤,如何该进?
原理:
(1)将电网的节点分为三类:内部系统节点集I,边界节点集B,外部系统节点集E。于是互联系统可用下列方程描述:
(2)消去外部节点,即消去 得:
由此方程可见:消去外部节点后只使YBB受到改变,也即边界节点的自导纳与互导纳改变。以及将外部系统的节点注入电流IE通过分配矩阵D=YBEYEE-1分配到边界接点上。
实际应用时,需要注入功率来代替注入电流,即
步骤:
(1)选取一种有代表性的基本运行方式,通过潮流计算确定权电网各节点的复电压。
(2)选取内部系统的范围和确定边界节点,然后对下列矩阵进行高斯消元
即消去外部系统,保留边界节点,就得到仅含有边界节点的外部等值导纳矩阵:
(3)根据 计算出分配到边界节点上的注入功率增量,并将其加到边界
节点的原有注入上,得到边界节点的等值注入PiEQ、QiEQ.
改进:
(1)因并联支路的存在,等值后边界节点电压变化与实际变化不一致,为减少这一因素所造成的误差,等值时应尽量不用并联支路,而是通过求边界等值注入来减小其影响。
(2)在等值时,如果外部系统中含有PV节点,则内部系统中发生事故断开时,应保持外部PV节点对内部系统提供无功支援。为此,进行外部等值时,应保留那些无功出力裕度较大,且与内部系统电气距离小的PV节点。
(3)根据某一运行方式的全网潮流解来进行外部等值,在运行方式发生改变时会产生很大的误差。需要采用校正方法来克服这一误差。一种简易的校正方法是先以内部系统实时数据作状态估计,求出边界节点的电压模值与电压相角,然后所有的边界节点作为平衡节点,对基本运行方式下的外部等值系统作潮流计算。
(4)Ward等值法必然导致导纳矩阵稀疏性变差,而其稀疏性决定于边界和外部系统的连接关系,通常当消去节点后,等值网的支路数小于原来支路的两倍加上节点数时,可采用Ward等值,否则停止这种等值。
4.保留非线性快速潮流算法原理,与牛顿法比较?
原理: 牛顿法求解非线性方程时采用了逐次线性化的方法,实际上是忽略了泰勒级数的高阶项,而保留非线性快速潮流算法缺考虑了泰勒级数的二阶项。
潮流方程组:
Y(x)在初值x(0)附近展开成没有截断误差的式子:
其中: 为修正量向量
研究表明上式可以写成:
从而得出迭代方程为:
经过迭代最终满足迭代判据要求。
与牛顿法比较:
牛顿法迭代公式为:
而保留非线性法迭代公式为:
(1)迭代过程中:牛顿法的雅可比矩阵变化,而保留非线性快速朝流算法的雅可比矩阵恒定;
(2)迭代计算量:每次迭代牛顿法要重新计算y(x(k)),而保留非线性快速潮流算法则要计算y(Δx(k)),由于计算函数式完全相同,仅变量不同,所以这部分的计算量是完全相同的,但由于保留非线性快速潮流算法不需要重新形成雅可比矩阵并三角分解,所以迭代所需时间大大节省。
(3)Δx含义不同:牛顿法的Δx(k)是相对于上一次迭代所得到的迭代点x(k)的修正量;而保留非线性快速朝流算法的Δx(k)则是相对于始终不变的初始值x(0)的修正量;
(4) 保留非线性快速朝流算法达到收敛所需的迭代次数要比牛顿法多,但由于每次迭代所需计算量比牛顿法省很多,所以总的计算速度比牛顿法可提高很多。
(5)由于不具对程性的雅可比矩阵三角分解后,其上下三角元素都需要保存,而牛顿法一种方法只需要保存上三角元素,因此,此算法的矩阵存储量要比牛顿法增加35%—40% 。
(6)初始值的选择对保留非线性快速潮流法的收敛性有很大影响。
5.不良数据的检测与辨识方法?并选择一种方法介绍其原理?
不良数据的检测是用来判定是否存在不良数据。通常有三种方法:①检测法;②加权残差检测法(法);③标准化残差检测法(法)。
辨识是为了寻找出哪一个数据是不良数据,以便进行剔除或补充。常用的方法有:残差搜索辨识法,估计辨识法,非二次准则辨识法等。
检测法原理:
①先假定电力系统没有不良数据存在,此时记加权残差为,加权测量误差为,则目标函数为:
k为测量冗余度。
当k>30时,
②假设当电力系统的测量中,第i个量是不良数据,且假定其值为,于是测量的误差向量应改写为:
,其中
此时加权测量误差向量可写为:
从而:
则
上式中右端第一项是设有不良数据时目标函数极值,它为k阶自由度的分布;第二项为零均值的正态分布;第三项为常数项,故的统计特性为:
当k>30时,趋于正态分布:
可以看出,当存在不良数据时,目标函数就急剧增大。利用这一特性可以检测不良数据。具体方法是:<r(r为检验阀值),则没有不良数据,否则有。
6. 电力系统中谐波产生的原因,并说明其分析方法
原因:非线性负荷从电网中吸收非线性正弦电流,引起电网电压畸变,电网中的谐波主要来源于非线性负载,我们可以把谐波分为三种:
①稳定性谐波:产生谐波成分和幅值基本上不变。如:电网电压稳定时的变压器铁芯非线性产生的谐波,带稳定负载的整流器等。
②动态性谐波源:产生谐波具有明显的随机性。如:电弧炉,电气机车等。
③突发性谐波源:这种谐波只有在特定的条件下产生。如:变压器空载合闸励磁涌流及投入电容器时的暂态过程是典型的突发性谐波源。
危害:
①会使发电机、变压器、电动机、补偿电容器等产生附加热效应。
②对电网运行会增加无功损耗,引起共振。
③会使一些电气设备产生机械振动。
④会使继电器动作失误,增加测量表计的测量误差。
⑤会造成某些自动装置工作不正常,引起通讯干扰。
⑥使家用电器工况变坏等。
分析方法:
①线性分析法:假定谐波源电流大小和相位与基波电流成线性关系。
②非线性频域法:将谐波源的各次谐波表示成相应谐波电压的变量函数并考虑基波潮流与谐波潮流的相互影响,通过两者联立迭代求解。
③非线性时域仿真法:用来分析暂态谐波,它从电网的状态方程出发,把系统和负荷描述成常微分方程,通过解该方程来求解电力系统谐波响应。
抑制方法:
减少谐波源含量;选择合理的供电电压;装设交流滤波器;采用新型保护;加装静止无功补偿装置;改变谐波源的配置或工作方式。
7.加权最小二乘法的原理和步骤
加权最小二乘法的以测量值z与测量估计值平方和最小,并为每一个测量量赋一个权值,精度高权值大,精度低权值小的估计方法。
建立加权最小二乘法的目标函数:
,其中W为加权正定阵。
令,为测量误差方阵。
于是目标函数可写为:
令,可以得到: 得到:
以上是在线性函数前提下讨论的。但在一般情况下h(x)为非线性函数,要采用迭代的方法来求解。先假定状态量初值为x(0),使h(x)在x(0)处线性化,进行泰勒级数在x(0)处展开,最终得出迭代方程为:
;
按照上式迭代修正直到满足收敛判据(使目标函数接近最小)。
经过次迭代得到,即为最优状态估计值。此时测量量的估计值是
步骤:
h(x)是x的非线性函数时,进行状态估计步骤如下:
①从状态量的初值计算测量函数向量和雅可比矩阵;
②由测量量z和计算残差z-和目标函数并由雅可比矩阵
③解上述迭代公式的第一式求取修正量,并取其中绝对值最大者。
④用收敛判据≤ε检测是否达到收敛标准。
⑤若未达到收敛标准,修改状态量,继续进行迭代计算,直到收敛为止。
8.PQ分解法与牛顿法(直角坐标)的区别和联系
联系:
PQ分解法实际上是在牛顿的基础上,利用有功功率的变化主要决定于电压相角的变化,而无功功率的变化主要决定于电压模值,以及线路两端电压相角差,这一特点简化而来,它实现了有功和无功的解耦。
区别:
①PQ分解法用两个几乎减半的方程组(一个n-1阶及一个n-m-1阶)代替牛顿法解一个2n-m-2阶方程组,显著减少了内存需量和计算量。
②不同于牛顿法每次迭代都咬重新形成雅可比矩阵并进行三角分解,PQ法只需一次形成三角分解,为此大打缩短了每次迭代时间。
③雅可比矩阵J不对称,而B’,B’’都是对称的,这样减少了分解计算量并节约了内存。
④快速解耦法跌打次数要比牛顿法多,但是每次迭代所需时间比牛顿法少,所以总的计算速度仍有大幅度提高。
9.潮流计算与状态估计的区别联系
联系: 潮流计算是在已知网络参数及n节点注入量的情况下,求系统的状态量—n节点电压。而状态估计是在有测量噪声的情况下,由m维测量量和网络参数通过估计算法求解系统的状态量—n节点电压。即他们的目的都是求解系统状态量。
区别:
①潮流计算中,方程式的数目=未知量的数目,而状态估计中,因测量量的维数一般大于未知状态向量的维数,亦即方程式的个数多余未知数的个数。
②求解方程不同:潮流计算中,一般用牛—拉法求解2n个非线性方程组,而状态估计则是根据一定的估计准则,按估计理论处理方法求解方程组的。
10.对电力系统稳态分析的认识
电力系统稳态分析是电力系统及其自动化的主要专业课之一,主要包括以下几个方面的内容:
①潮流计算:包括常规算法和规划算法。其中牛顿—拉夫逊法是基础,它是其他一些派生算法的基础,具有快速的收敛性和良好的收敛可靠性。
②状态估计:对有一定冗余度的量测量进行估计计算,得到能表征系统特征的状态变量,包括静态估计和动态估计。其目的在于建立实时数据库,也可用于负荷预报。目前常用的方法有:最小二乘法,支路潮流状态估计,递推状态估计。
③电力系统的静态安全分析:根据系统在发生预想事故后会不会发生过负荷或电压越限来判断系统的安全性。其目的在于:及时将系统从不安全状态通过预防控制换变为安全正常状态。
④电力系统复杂故障分析。
相关试卷
2023广州高三调研测试(一模)物理试题可编辑PDF版含答案: 这是一份2023广州高三调研测试(一模)物理试题可编辑PDF版含答案,文件包含2023届广东省广州市高三调研测试一模物理试题可编辑pdf、物理答案pdf等2份试卷配套教学资源,其中试卷共8页, 欢迎下载使用。
高中物理人教版 (2019)必修 第三册1 电荷同步练习题: 这是一份高中物理人教版 (2019)必修 第三册1 电荷同步练习题,共5页。
2022南通新高考基地学校高三下学期第四次大联考试题(正稿)物理PDF版含答案(可编辑): 这是一份2022南通新高考基地学校高三下学期第四次大联考试题(正稿)物理PDF版含答案(可编辑),文件包含第四次大联考物理试卷正稿pdf、物理第四次大联考答案pdf等2份试卷配套教学资源,其中试卷共10页, 欢迎下载使用。