
资料中包含下列文件,点击文件名可预览资料内容













还剩52页未读,
继续阅读
所属成套资源:人教版八下物理课件+教案+导学案+同步练习+内嵌视频
成套系列资料,整套一键下载
人教版八下物理 第十二章《简单机械》 课件+同步练习+内嵌视频
展开
这是一份【人教版】八下物理 第十二章《简单机械》 课件+同步练习+内嵌视频,文件包含第十二章《简单机械》本章复习pptx、第十二章《机械效率》单元测试题解析版docx、第十二章《机械效率》单元测试题原卷版docx等3份课件配套教学资源,其中PPT共60页, 欢迎下载使用。
单 元 复 习
CHUZHONGWULI
第十二章 简单机械
物理
人教版 物理 八年级 下册
第1节
杠 杆
本章内容
第2节
滑 轮
第3节
机械效率
本章内容结构
第1节 杠杆
在力的作用下能绕固定点转动的硬棒
支点0:杠杆绕着转动的固定点
动力F1:使杠杆转动的力(人施加的力)
阻力F2:阻碍杠杆转动的力(物体施加的力)
动力臂l1:从支点到动力作用线的距离
阻力臂l2:从支点到阻力作用线的距离
平衡:杠杆在动力和阻力作用下保持静止或或匀速转动
平衡条件:动力×动力臂=阻力×阻力臂
F1l1=F2l2
等臂杠杆:l1=l2 F1=F2,不省力,也不费距离
五要素
杠杆平衡
杠杆分类
杠杆
知识结构
第1节 杠杆
费力杠杆:l1<l2 F1>F2,费力,省距离
省力杠杆:l1>l2 F1<F2,省力,费距离
知识点一:杠杆
第1节 杠杆
1. 杠杆的概念:一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就是杠杆。
②一根硬棒要成为杠杆,应具备两个条件: 要有力的作用;能绕某一固定点转动。同时满足,缺一不可。
注意: ① “硬棒” 是指在力的作用不发生形变。杠杆可以是直的,也可以是弯曲的。
2. 杠杆的“五要素”
注意:“力的作用线” 是指过力的作用点沿力的方向所画的直线。不是支点到作用点的距离。
支点0:杠杆绕着转动的固定点.
动力F1:使杠杆转动的力(人施加的力).
阻力F2:阻碍杠杆转动的力(物体施加的力).
动力臂l1:从支点到动力作用线的距离.
阻力臂l2:从支点到阻力作用线的距离.
知识点一:杠杆
第1节 杠杆
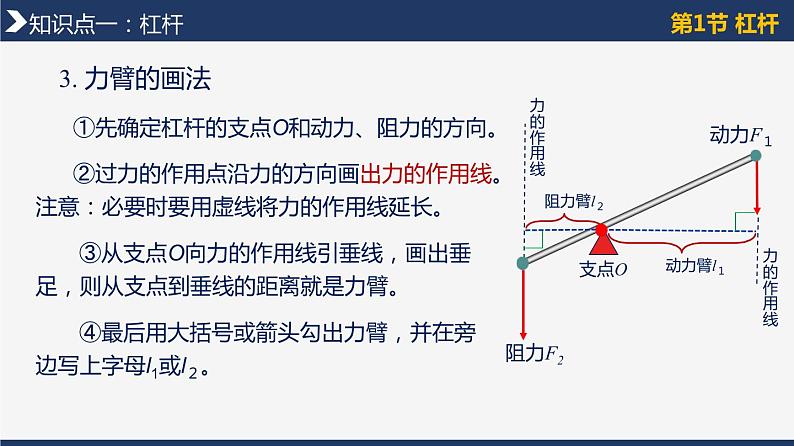
3. 力臂的画法
③从支点O向力的作用线引垂线,画出垂足,则从支点到垂线的距离就是力臂。
②过力的作用点沿力的方向画出力的作用线。注意:必要时要用虚线将力的作用线延长。
①先确定杠杆的支点O和动力、阻力的方向。
④最后用大括号或箭头勾出力臂,并在旁边写上字母l1或l2。
力的作用线
力的作用线
知识点一:杠杆
第1节 杠杆
注意:力臂包含了力的作用点和力的方向两个要素。力臂不一定在杠杆上,当力的作用线与杠杆不垂直时,力臂与杠杆不重合。
如图所示,当杠杆在水平方向上平衡时,阻力F2的方向与杠杆垂直,其阻力臂为20cm,与杠杆重合。动力F1的方向与杠杆不垂直,其动力臂L1不在杠杆上。
知识点一:杠杆
第1节 杠杆
4. 动力与阻力
支点一定在杠杆上。动力和阻力可以在支点两侧,也可在支点同侧;作用在杠杆上的动力和阻力的方向既可以相同,也可以相反,但是使杠杆转动的方向一定是相反的。
动力和阻力在支点两侧,方向相同。动力使杠杆顺时针转动;阻力使杠杆逆时针转动,动力和阻力对杠杆的转动效果相反。
动力和阻力在支点同侧,方向相反。动力使杠杆逆时针转动;阻力使杠杆顺时针转动,动力和阻力对杠杆的转动效果相反。
知识点一:杠杆
第1节 杠杆
知识点二:杠杆的平衡条件
第1节 杠杆
杠杆平衡时:动力×动力臂=阻力×阻力臂
计算公式:
F1 l1=F2 l2
或变形式:
作用在杠杆上两个力的大小与他们的力臂成反比
2. 杠杆的平衡条件
①应用公式计算时,单位要统一,即动力和阻力的单位要用牛(N),动力臂和阻力臂的单位要相同。
②杠杆是否平衡,取决于力和力臂的乘积:乘积相等就平衡;否则沿着乘积大的那端转动。
1. 杠杆的平衡: 杠杆在动力和阻力作用下静止或匀速转动时,就说杠杆平衡。
①杠杆是否平衡是由动力、阻力、动力臂和阻力臂共同决定的。为了研究其平衡条件,可以在杠杆处于平衡状态时,分别测出动力F1、阻力F2、动力臂l1和阻力臂l2,然后经过大量的数据对比,归纳出杠杆的平衡条件。
知识点二:杠杆的平衡条件
第1节 杠杆
②实验器材:杠杆、钩码、铁架台、弹簧测力计。
③实验表格
设计实验
3. 探究杠杆的平衡条件
①把杠杆安装在支架上,调节杠杆两端的平衡螺母, 使杠杆在水平位置平衡。
知识点二:杠杆的平衡条件
第1节 杠杆
②在杠杆两边挂不同数量的钩码,把支点右边的钩码对杠杆的作用力当作动力F1,支点左边的钩码对杠杆的作用力当作阻力F2。
调节钩码的位置,使杠杆在水平位置重新平衡,将动力F1、阻力F2、动力臂L1、阻力臂L2的实验数据填入表中。
进行实验
③改变阻力和阻力臂的大小,相应调节动力和动力臂的大小,使杠杆在水平位置重新平衡,再做几次实验。
知识点二:杠杆的平衡条件
第1节 杠杆
④在杠杆的一侧挂上钩码作为阻力,通过在其他位置上用弹簧测力计拉住杠杆的办法使杠杆平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录在表格中。
注意:弹簧测力计只有沿竖直方向施加力,才可以直接读出力臂。
实验结果表明,动力臂越长,需要的力越小;动力臂越短,需要的力越大。二者之间是反比关系。
实验结论:
杠杆平衡时,动力×动力臂=阻力×阻力臂,即F1 L1 = F2 L2
知识点二:杠杆的平衡条件
第1节 杠杆
分析论证
①杠杆在水平位置静止的目的是: 一是使杠杆的重心在支点,以消除杠杆自身重力对实验的影响;二是便于直接读出力臂。
②多次测量获得多组实验数据的目的是: 避免偶然性,获得普遍性的结论。
③在实验前要调节杠杆两端的平衡螺母,使杠杆水平平衡。挂钩码后,不能再调节平衡螺母。
④读数时,杠杆仍要保持处于水平平衡状态,以便直接读出力臂的长度。
知识点二:杠杆的平衡条件
第1节 杠杆
交流评估
∟
⑤弹簧测力计一定沿竖直方向施加力。
如图(a)所示,弹簧测力计沿竖直方向施加力时,力臂l1=10cm,可以直接读出。
如图(b)所示,弹簧测力计不沿竖直方向施力,力臂为l2, l2 <l1=10cm,不能直接从杠杆上读出。
知识点二:杠杆的平衡条件
第1节 杠杆
根据杠杆的平衡条件进行分析:
F1 l1=F2 l2
1. 三种杠杆
知识点三:生活中的杠杆
第1节 杠杆
省力费距离
省距离费力
不省力也不省距离
撬棍、扳手、钢丝钳
天平、跷跷板
镊子、鱼竿、筷子
l动>l阻
l动<l阻
l动=l阻
视频总结——《杠杆与杠杆的平衡条件》
【例题1】如图为运动员手持铅球(图中未画出)时的情景。此时,手臂受力时可简化为桡骨在肱二头肌的牵引下绕肘关节转动的模型。关于这个物理模型,下列选项正确的是_______。
①图甲中的 l1、l2分别表示F1和F2的力臂②图乙中的l1、l2分别表示F1和F2的力臂③手臂是个省力杠杆④手臂是个费力杠杆
② ④
解析见下页
第1节 杠杆
过支点作力的作用线的垂线段,该垂线段为力臂,图甲中l2的力臂错误,图乙中的两个力臂正确,故①错误,②正确;由图乙可知,此时的动力臂小于阻力臂,为费力杠杆,故③错误, ④正确。
故选②④ 。
第1节 杠杆
【例题2】在“探究杠杆平衡条件”的实验中:①如图甲所示,实验前杠杆左端下沉,则应将平衡螺母向_____(选填“左”或“右”)调节,直到杠杆在______位置平衡;
①探究杠杆平衡条件实验前,要调节杠杆在水平位置平衡,调节的方法是哪端高,平衡螺母向哪端调节,图中杠杆左端下沉,故应将平衡螺母向右调节,直到杠杆在水平位置平衡。
水平
右
第1节 杠杆
②如图乙所示,杠杆上刻度均匀,在A点挂3个钩码,要使杠杆在水平位置平衡,应在B点挂_____个相同的钩码;当杠杆平衡后,将A、B两点下方同时增加一个相同的钩码,则杠杆将__________(选填“左端下沉”、“右端下沉”或“仍保持静止不动”);
②据杠杆的平衡条件F1l1=F2l2,设杠杆的1格长为L,每个钩码重力为G,则左边力与力臂乘积为3G×4L=12GL.右边力臂长为3L,故所挂钩码重为: 故右边B点处应挂4个钩码,杠杆在水平位置平衡。
当杠杆平衡后,将A、B两点下方同时增加一个相同的钩码,由于左边的力臂大于右边力臂,可知两边增加的力与力臂乘积左边大于右边,故杠杆将左端下沉。
4
左端下沉
第1节 杠杆
③如图丙所示,若不在B点挂钩码,改用弹簧测力计在C点竖直向上拉杠杆,使杠杆在水平位置平衡;当弹簧测力计从图丙位置转到图丁位置时,其示数会______(选填“变大”、“不变”或“变小”),原因是____________。
③若不在B点挂钩码,改用弹簧测力计在C点竖直向上拉杠杆,使杠杆在水平位置平衡;当弹簧测力计从图丙位置转到图丁位置时,拉力的力臂逐渐减小,由阻力和阻力臂的乘积不变,可得弹簧测力计示数将变大。
变大
力臂变小
第1节 杠杆
【例题3】如图所示是小明同学做俯卧撑时的示意图,他的质量为56kg,身体可视为杠杆,O点为支点,A点为重心。(g=10N/ kg)(1)该同学所受重力是多少?(2)在图中画出该同学所受重力的示意图,并画出重力的力臂l1;(3)若OB=1.0m,BC=0.4m,求地面对双手支持力的大小。
解析见下页
第1节 杠杆
(1)该同学的重力 G=mg=56 kg ×10N/ kg=560N(2)该同学所受重力的示意图如下,以O点为支点,过O点作重力作用线的垂线段,即为重力的力臂l1.(3)地面对双手支持力F的方向竖直向上,其力臂长度为 OC=OB+ BC=1.0m+0.4m=1.4m 根据杠杆的平衡条件得 G·OB=F ·OC 可得
第1节 杠杆
【例题4】如图所示,两个和尚用轻质扁担抬水,水桶和水的总重力为200 N。扁担在水平位置平衡时,水桶细绳悬挂点与甲和尚肩上支撑点距离为0.8米,距乙和尚肩上支撑点为1.2米。(g=10 N/kg)求:(1)水桶和水的总质量;(2)乙和尚对扁担的支持力;(3)当乙和尚独自把肩膀往后挪(增加肩上支撑点与桶细绳悬挂点的距离),则甲和尚对扁担的支持力有何变化?(只需回答结果,不必写出原因)
解析见下页
第1节 杠杆
【例题4】水桶和水的总重力为200 N。扁担在水平位置平衡时,水桶细绳悬挂点与甲和尚肩上支撑点距离为0.8m,距乙和尚肩上支撑点为1.2m(g=10 N/kg)。求:(1)水桶和水的总质量;(2)乙和尚对扁担的支持力;
第1节 杠杆
(3)当乙和尚独自把肩膀往后挪(增加肩上支撑点与桶细绳悬挂点的距离),则甲和尚对扁担的支持力有何变化?(只需回答结果,不必写出原因)
(3)以甲和尚肩为支点,当乙和尚独自把肩膀往后挪,乙的力臂l乙变大,水桶重力G不变,桶重力的力臂l桶不变,根据F乙l乙=Gl桶,乙对扁担支持力F乙变小。因为甲、乙对扁担支持力之和为水桶总重是不变F甲+F乙=G桶,乙对扁担支持力减小,甲对扁担支持力就增大。
第1节 杠杆
第2节 滑轮
知识结构
第2节 滑轮
定滑轮、动滑轮、滑轮组的比较 (不计绳重、摩擦)
F=G
s=h
不省力不省距离能改变力的方向
s=2h
省力、费距离,不能改变力的方向
s=nh(n为动滑轮上绳子段数)
省力、费距离,能否改变力的方向和绕线方式有关
① 定滑轮:使用时,轴固定不动的滑轮,叫定滑轮。
② 定滑轮的特点
1. 定滑轮
定滑轮
F
G
知识点一、定滑轮和动滑轮
第2节 滑轮
③定滑轮的实质——等臂杠杆
如图所示,定滑轮的轴心O为支点,动力臂l1与阻力臂l2都是滑轮的半径r。
F=G
F1l1=F2l2
l1=l2=r
Fl1=Gl2
通过理论分析可知,定滑轮实质上是一个等臂杠杆,所以不省力。
知识点一、定滑轮和动滑轮
第2节 滑轮
④用平衡力的知识研究定滑轮的特点
在忽略摩擦的情况下,物体受到重力G和拉力F的作用。由于物体匀速上升,所以拉力F跟物体的重力G是一对平衡力,大小相等: F=G
使用定滑轮不省力,可以改变力的方向。
物体向上运动,用力却是往下拉,所以使用定滑轮能改变力的方向.
知识点一、定滑轮和动滑轮
第2节 滑轮
①动滑轮:工作时,轴随着物体移动的滑轮叫动滑轮。
2. 动滑轮
②动滑轮的特点
动滑轮
S绳=2h物
F
G
知识点一、定滑轮和动滑轮
第2节 滑轮
③动滑轮的实质
动滑轮的实质是一个动力臂为阻力臂二倍的杠杆。
动滑轮相当于一根杠杆,支点在绳和轮相切的A处;拉力F是动力,重物的拉力是阻力G;动力臂l1是轮直径、阻力臂l2是轮半径。
根据杠杆的平衡条件:Fl1=Gl2
知识点一、定滑轮和动滑轮
第2节 滑轮
④用平衡力的知识研究动滑轮的特点
G动
知识点一、定滑轮和动滑轮
第2节 滑轮
①滑轮组:将定滑轮和动滑轮组合在一起就组成了滑轮组。
不计绳重和摩擦但考虑滑轮重:
1. 滑轮组
②滑轮组的特点:
知识点二、滑轮组
第2节 滑轮
2. 滑轮组的组装与设计
知识点二、滑轮组
第2节 滑轮
①轮轴:由具有共同转动轴的大轮和小轮组成。大轮叫轮,小轮叫轴。
根据杠杆的平衡条件: F1l1 = F2l2
当动力作用在轴上时,轮轴是一个费力杠杆,但省距离。
∵ R >r,∴ FFR = Gr
1. 轮轴
②轮轴可以看成一个可连续转动的不等臂杠杆。支点在轴心0,轮半径R是动力臂,轴半径r阻力臂。
当动力作用在轮上时,轮轴是一个省力杠杆,但费距离。
知识点三、轮轴和斜面
第2节 滑轮
①斜面的原理
如果不计摩擦,斜面长是斜面高的几倍,拉力就是物体重力的几分之一。斜面是一种省力的机械。
如图,把重为G的物体,沿着长为L,高为h的斜面,用力F拉上去的过程中:
沿斜面向上的推力:
2. 斜面
知识点三、轮轴和斜面
第2节 滑轮
视频总结——《滑轮的几种用法分析》
A
第2节 滑轮
【例题2】用如图所示的滑轮组吊起重500 N的重物。已知绳子能承受的最大拉力为200 N,请画出绕绳的方法(不计滑轮重与摩擦)。
滑轮组吊起重500 N的重物,已知绳子能承受的最大拉力为200 N,则绳子段数为n=500N/200N=2.5=3。n为奇数,则绳子的固定端挂在动滑轮上。
第2节 滑轮
【例题3】工人用如图所示的滑轮组运送建材上楼,每次运送量不定,滑轮与钢绳间的摩擦力及绳重忽略不计。若某一次工人将重800N的建材匀速竖直向上提升了6m,所用的拉力为300N,求:(1)动滑轮的重力;(2)钢绳自由端移动的距离;(3)当所运送建材的重为1100N时,工人作用在绳子上的拉力。
第2节 滑轮
解析见下页
第2节 滑轮
【例题4】如图,两个滑轮组,提升一个重为17N的物体A(每个滑轮重相同),使物体A在2s内拉升了20cm,拉力如图所示,下列说法正确的是( )A.甲中,绳端移动的距离为60cm B.乙中,拉力的速度为0.3m/sC.甲中,动滑轮由两根绳子吊着 D.乙中,动滑轮的重力为2N
第2节 滑轮
解析见下页
AC.甲图中,动滑轮由三根绳子吊着,故C错误;物体A在2s内拉升了20cm,则甲中绳端移动的距离是物体A上升的高度三倍,即 S甲=3h甲=3×20cm=60cm,故A正确.B.乙图绳端的拉力是9N,两条绳子托着动滑轮,则乙中绳端移动的距离是物体A上升的高度两倍,即S乙=2h乙=2×20cm=40cm=0.4m,时间t=2s,乙中绳端移动的速度v乙= S乙 / t乙= 0.4m/2s =0.2m/s ,故B错误.
第2节 滑轮
D.乙图绳端的拉力是9N,n=2,设动滑轮的重力G动,物体A的重力是17N,则2F乙= G动+ GA 得2×9N= G动+17N 解得G动=1N. 故D错误。所以选A。
第3节 机械效率
知识结构
机械效率
有用功W有:为完成目的必须做的功
额外功W额:为完成目的,不需要但又不得不做的功
总功W总:有用功和额外功总和 W总=W有+W额
(不用机械时人做的功)
(机械自重或摩擦阻力做功)
(使用机械时人做的功)
功的原理:使用任何机械都不省功
机械效率η:有用功与总功的百分比.
特点:使用机械做功时,总存在额外功,故机械效率总小于1.
机械效率
公式:
提高滑轮组机械效率的方法
增大物体的重力(W有增大,W额不变,η变大)
减小动滑轮的重力(W有不变,W额减小,η变大)
第3节 机械效率
知识点一、有用功和额外功
第3节 机械效率
(以使用动滑轮提升钩码进行分析)
②额外功 要提升钩码,必须将动滑轮和绳子也提升,同时还要克服摩擦做功。这些功:是对人们无用但又不得不做的功叫做额外功。
①有用功 提升钩码是目的,有利用价值,对钩码做的功:是为完成目的必须做的功叫做有用功。
③总功 人做的功为总功 W总=Fs,有用功与额外功之和:W总=W有+W额
1. 机械的三种功
①物理学中,将有用功跟总功的比值叫做机械效率。
注:机械效率只有大小,没有单位。由于有用功总小于总功,所以机械效率总小于1 。机械效率通常用百分数表示。
机械效率是标志机械做功性能好坏的重要指标,机械效率越高,机械的性能越好。
③变形公式:
W有= W总η
②计算公式:
1. 机械效率 η
知识点二、机械效率
第3节 机械效率
2. 杠杆的机械效率
如图所示,利用杠杆把重力为G的物体提高h,F 为动力,s为动力作用点移动的距离。
知识点二、机械效率
第3节 机械效率
3. 滑轮组的机械效率
由公式可知: 当动滑轮的重力一定时,物重越大,机械效率越高。
如图所示,利用滑轮组把重力为G的物体提高h。F 为动力,s为绳子自由端移动的距离,n为承担重物的绳子股数。
知识点二、机械效率
①竖直提升重物
第3节 机械效率
②滑轮或滑轮组水平拉动物体(不计滑轮及绳重)
知识点二、机械效率
第3节 机械效率
4. 斜面的机械效率
如图所示,用力F沿斜面把重力为G的物体提高,h为斜面的高度,l为斜面的长度。f 为物体与斜面间的摩擦力。
知识点二、机械效率
第3节 机械效率
知识点三、测量滑轮组的机械效率
设计和进行实验
测量的物理量:拉力F及移动的距离S;物重G及升高的距离h。
第3节 机械效率
③实验方法:控制变量法
知识点三、测量滑轮组的机械效率
第3节 机械效率
进行实验
①按照图甲那样安装滑轮组,算出钩码的重力G,并记下钩码和绳端的位置。
②如图乙,匀速竖直缓慢拉动弹簧测力计,使钩码缓慢上升,读出拉力F的值,并用刻度尺测出钩码上升的高度h和绳端移动的距离s。
④改变钩码的数量,再做两次上面的实验。
1. 探究滑轮组的机械效率与物体重力的关系
知识点三、测量滑轮组的机械效率
第3节 机械效率
分析和论证
60.6%
71.4%
78.4%
实验结论:同一滑轮组,提升物体的重力越大,机械效率越高。
数据分析:三次实验中的机械效率不同。同一滑轮组,钩码的重力越大,机械效率越高。
知识点三、测量滑轮组的机械效率
第3节 机械效率
①按照图甲安装滑轮组,用弹簧测力计测量动滑轮A重力GA,分别记下钩码和绳端的位置。②匀速缓慢拉动弹簧测力计,使钩码升高,读出拉力F的值,用刻度尺测出钩码上升的高度h和绳端移动的距离s,将测量数据填入表格。③如图乙所示,改变动滑轮的重力,换用动滑轮B,重复上述实验。④算出有用功W有、总功W总、机械效率η,并填入表格。
2. 探究滑轮组的机械效率与动滑轮重力的关系
知识点三、测量滑轮组的机械效率
进行实验
第3节 机械效率
钩码的重力G码=3N
64.5%
53.0%
知识点三、测量滑轮组的机械效率
分析和论证
第3节 机械效率
实验结论:不同的滑轮组提高重力相同的物体,动滑轮的重力越大,机械效率越低。
数据分析:两次实验中的机械效率不同。不同滑轮组,所提钩码的重力相同,动滑轮的重力越大,机械效率越低。
同一滑轮组,提升物体重力的越大,机械效率越高; 不同滑轮组提升重力相等的物体,动滑轮重力越小,机械效率越高。
综合以上实验,归纳得出结论:
知识点三、测量滑轮组的机械效率
第3节 机械效率
①实验时拉力的方向应尽量____________,应在钩码__________的过程中读取拉力的大小。
竖直向上
匀速移动
②确定绕线方式与承担重物绳子的段数n:与动滑轮连接的段数即为承担重物绳子的段数,如图所示,n=3,用“奇动偶定法”确定绕线方式。③影响滑轮组机械效率的因素:物体的 、动滑轮的________、绳子与滑轮之间的摩擦力。与绳子的绕法、绳子段数________。
交流、反思与评估
重力
重力
无关
知识点三、测量滑轮组的机械效率
第3节 机械效率
摩擦
刻度尺
知识点三、测量滑轮组的机械效率
交流、反思与评估
第3节 机械效率
影响滑轮组机械效率的因素和改进措施
被提升物体的重力
动滑轮自身的重力
滑轮组自身部件的摩擦
同一个滑轮组,被提升物体的重力越大,做的有用功越多,机械效率越大
有用功不变时,减小提升动滑轮时做的额外功,可提高机械效率
机械自身部件的摩擦力越大,机械效率越低
在机械承受的范围内,尽可能增加被提升物体的重力
改进滑轮结构,减轻滑轮自重
对机械进行保养,保持良 好的润滑,减小摩擦
知识点四、提高机械效率的方法
第3节 机械效率
课堂总结——《第3节 机械效率》
【例题1】如图6所示,在斜面上将一个重为15 N的物体匀速从斜面底端拉到顶端,沿斜面向上的拉力F=6 N,斜面长s=1.2 m、斜面高h=0.3 m。下列说法正确的是( )
A.克服物体重力做功7.2 J B.额外功为1.8 JC.物体受到的摩擦力为2.25 N D.斜面的机械效率为37.5 %
C
解析见下页
第3节 机械效率
A. 克服物体重力做功:W有=Gh=15N×0.3m=4.5J,故A错误;B. 拉力做的总功:W总=Fs=6 N×1.2 m=7.2 J, 则额外功:W额=W总-W有=7.2 J-4.5 J=2.7J,故B错误;C. 物体受到的摩擦力:f=W额/s=2.7J/1.2m=2.25N,故C正确;D. 斜面的机械效率:η=W有/W总=4.5J/7.2J=62.5%,故D错误。
所以选C
A.克服物体重力做功7.2 J B.额外功为1.8 JC.物体受到的摩擦力为2.25 N D.斜面的机械效率为37.5 %
第3节 机械效率
【例题2】用相同的两个滑轮按如图两种方式组装,将重为G的重物(物重大于滑轮重)在相同的时间内匀速竖直提升相同的高度h,则拉力大小关系:F1_____F2,拉力做功大小关系:W1_____W2,绳子自由端移动的速度关系:v1____v2,两滑轮的机械效率关系:η1____η2。(均选填“>”、“<”或“=”)(不计绳重及摩擦)
<
>
>
<
解析见下页
第3节 机械效率
第3节 机械效率
(1)在实验过程中,小明应______________向上拉动弹簧测力计;(2)小明做实验测量的有关数据如表,其中第1次实验的拉力读数如图乙所示,则第1次实验的拉力为______N,第3次实验的机械效率为______;
【例题3】如图甲所示是小明“测量滑轮组的机械效率”的装置。
沿竖直方向匀速
0.6
83.3%
解析见下页
第3节 机械效率
第3节 机械效率
(3)分析表中的测量结果,得到的结论是:同一滑轮组,提升的物体越重,滑轮组的机械效率越______;(4)该实验要进行三次测量其目的是_________________(填“取平均值减小误差”或“得到的结论具有普遍性”);
大
得到的结论具有普遍性
(3)从第1次实验到第3次实验,钩码的重力不断增加,机械效率不断提高,故可得出结论:同一滑轮组,提升的物体越重,滑轮组的机械效率越大。(4)为避免实验的偶然性,寻找普遍规律,得出结论,实验需要进行多次。
第3节 机械效率
(5)为了提高滑轮组机械效率,根据所学知识和生活经验,可采取的措施有__________。A.减轻动滑轮重 B.增加所提物体重C.机械加润滑油 D.增加重物上升高度
ABC
ABC.由 可知,要想提高机械效率,可以增加有用功,减小额外功。减轻动滑轮重,可以减少克服动滑轮重做的额外功;机械加润滑油,可以减少克服摩擦所做的额外功;增加物重,可以增加有用功。以上都可以提高机械效率。故ABC符合题意; D.由 可知,机械效率大小与重物上升高度无关。故D不符合题意。
故选ABC。
第3节 机械效率
【例题4】工人利用如图所示的滑轮组将重900 N的物体竖直向上匀速提升0.5 m,工人所用的拉力F为600 N,(不计摩擦和绳重),求:①人的拉力做的功为多少焦?②此滑轮组的机械效率为多少?③若用此滑轮组提升重为1500N的物体,拉力F是多大?
解析见下页
第3节 机械效率
第3节 机械效率
单 元 复 习
CHUZHONGWULI
第十二章 简单机械
物理
人教版 物理 八年级 下册
第1节
杠 杆
本章内容
第2节
滑 轮
第3节
机械效率
本章内容结构
第1节 杠杆
在力的作用下能绕固定点转动的硬棒
支点0:杠杆绕着转动的固定点
动力F1:使杠杆转动的力(人施加的力)
阻力F2:阻碍杠杆转动的力(物体施加的力)
动力臂l1:从支点到动力作用线的距离
阻力臂l2:从支点到阻力作用线的距离
平衡:杠杆在动力和阻力作用下保持静止或或匀速转动
平衡条件:动力×动力臂=阻力×阻力臂
F1l1=F2l2
等臂杠杆:l1=l2 F1=F2,不省力,也不费距离
五要素
杠杆平衡
杠杆分类
杠杆
知识结构
第1节 杠杆
费力杠杆:l1<l2 F1>F2,费力,省距离
省力杠杆:l1>l2 F1<F2,省力,费距离
知识点一:杠杆
第1节 杠杆
1. 杠杆的概念:一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就是杠杆。
②一根硬棒要成为杠杆,应具备两个条件: 要有力的作用;能绕某一固定点转动。同时满足,缺一不可。
注意: ① “硬棒” 是指在力的作用不发生形变。杠杆可以是直的,也可以是弯曲的。
2. 杠杆的“五要素”
注意:“力的作用线” 是指过力的作用点沿力的方向所画的直线。不是支点到作用点的距离。
支点0:杠杆绕着转动的固定点.
动力F1:使杠杆转动的力(人施加的力).
阻力F2:阻碍杠杆转动的力(物体施加的力).
动力臂l1:从支点到动力作用线的距离.
阻力臂l2:从支点到阻力作用线的距离.
知识点一:杠杆
第1节 杠杆
3. 力臂的画法
③从支点O向力的作用线引垂线,画出垂足,则从支点到垂线的距离就是力臂。
②过力的作用点沿力的方向画出力的作用线。注意:必要时要用虚线将力的作用线延长。
①先确定杠杆的支点O和动力、阻力的方向。
④最后用大括号或箭头勾出力臂,并在旁边写上字母l1或l2。
力的作用线
力的作用线
知识点一:杠杆
第1节 杠杆
注意:力臂包含了力的作用点和力的方向两个要素。力臂不一定在杠杆上,当力的作用线与杠杆不垂直时,力臂与杠杆不重合。
如图所示,当杠杆在水平方向上平衡时,阻力F2的方向与杠杆垂直,其阻力臂为20cm,与杠杆重合。动力F1的方向与杠杆不垂直,其动力臂L1不在杠杆上。
知识点一:杠杆
第1节 杠杆
4. 动力与阻力
支点一定在杠杆上。动力和阻力可以在支点两侧,也可在支点同侧;作用在杠杆上的动力和阻力的方向既可以相同,也可以相反,但是使杠杆转动的方向一定是相反的。
动力和阻力在支点两侧,方向相同。动力使杠杆顺时针转动;阻力使杠杆逆时针转动,动力和阻力对杠杆的转动效果相反。
动力和阻力在支点同侧,方向相反。动力使杠杆逆时针转动;阻力使杠杆顺时针转动,动力和阻力对杠杆的转动效果相反。
知识点一:杠杆
第1节 杠杆
知识点二:杠杆的平衡条件
第1节 杠杆
杠杆平衡时:动力×动力臂=阻力×阻力臂
计算公式:
F1 l1=F2 l2
或变形式:
作用在杠杆上两个力的大小与他们的力臂成反比
2. 杠杆的平衡条件
①应用公式计算时,单位要统一,即动力和阻力的单位要用牛(N),动力臂和阻力臂的单位要相同。
②杠杆是否平衡,取决于力和力臂的乘积:乘积相等就平衡;否则沿着乘积大的那端转动。
1. 杠杆的平衡: 杠杆在动力和阻力作用下静止或匀速转动时,就说杠杆平衡。
①杠杆是否平衡是由动力、阻力、动力臂和阻力臂共同决定的。为了研究其平衡条件,可以在杠杆处于平衡状态时,分别测出动力F1、阻力F2、动力臂l1和阻力臂l2,然后经过大量的数据对比,归纳出杠杆的平衡条件。
知识点二:杠杆的平衡条件
第1节 杠杆
②实验器材:杠杆、钩码、铁架台、弹簧测力计。
③实验表格
设计实验
3. 探究杠杆的平衡条件
①把杠杆安装在支架上,调节杠杆两端的平衡螺母, 使杠杆在水平位置平衡。
知识点二:杠杆的平衡条件
第1节 杠杆
②在杠杆两边挂不同数量的钩码,把支点右边的钩码对杠杆的作用力当作动力F1,支点左边的钩码对杠杆的作用力当作阻力F2。
调节钩码的位置,使杠杆在水平位置重新平衡,将动力F1、阻力F2、动力臂L1、阻力臂L2的实验数据填入表中。
进行实验
③改变阻力和阻力臂的大小,相应调节动力和动力臂的大小,使杠杆在水平位置重新平衡,再做几次实验。
知识点二:杠杆的平衡条件
第1节 杠杆
④在杠杆的一侧挂上钩码作为阻力,通过在其他位置上用弹簧测力计拉住杠杆的办法使杠杆平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录在表格中。
注意:弹簧测力计只有沿竖直方向施加力,才可以直接读出力臂。
实验结果表明,动力臂越长,需要的力越小;动力臂越短,需要的力越大。二者之间是反比关系。
实验结论:
杠杆平衡时,动力×动力臂=阻力×阻力臂,即F1 L1 = F2 L2
知识点二:杠杆的平衡条件
第1节 杠杆
分析论证
①杠杆在水平位置静止的目的是: 一是使杠杆的重心在支点,以消除杠杆自身重力对实验的影响;二是便于直接读出力臂。
②多次测量获得多组实验数据的目的是: 避免偶然性,获得普遍性的结论。
③在实验前要调节杠杆两端的平衡螺母,使杠杆水平平衡。挂钩码后,不能再调节平衡螺母。
④读数时,杠杆仍要保持处于水平平衡状态,以便直接读出力臂的长度。
知识点二:杠杆的平衡条件
第1节 杠杆
交流评估
∟
⑤弹簧测力计一定沿竖直方向施加力。
如图(a)所示,弹簧测力计沿竖直方向施加力时,力臂l1=10cm,可以直接读出。
如图(b)所示,弹簧测力计不沿竖直方向施力,力臂为l2, l2 <l1=10cm,不能直接从杠杆上读出。
知识点二:杠杆的平衡条件
第1节 杠杆
根据杠杆的平衡条件进行分析:
F1 l1=F2 l2
1. 三种杠杆
知识点三:生活中的杠杆
第1节 杠杆
省力费距离
省距离费力
不省力也不省距离
撬棍、扳手、钢丝钳
天平、跷跷板
镊子、鱼竿、筷子
l动>l阻
l动<l阻
l动=l阻
视频总结——《杠杆与杠杆的平衡条件》
【例题1】如图为运动员手持铅球(图中未画出)时的情景。此时,手臂受力时可简化为桡骨在肱二头肌的牵引下绕肘关节转动的模型。关于这个物理模型,下列选项正确的是_______。
①图甲中的 l1、l2分别表示F1和F2的力臂②图乙中的l1、l2分别表示F1和F2的力臂③手臂是个省力杠杆④手臂是个费力杠杆
② ④
解析见下页
第1节 杠杆
过支点作力的作用线的垂线段,该垂线段为力臂,图甲中l2的力臂错误,图乙中的两个力臂正确,故①错误,②正确;由图乙可知,此时的动力臂小于阻力臂,为费力杠杆,故③错误, ④正确。
故选②④ 。
第1节 杠杆
【例题2】在“探究杠杆平衡条件”的实验中:①如图甲所示,实验前杠杆左端下沉,则应将平衡螺母向_____(选填“左”或“右”)调节,直到杠杆在______位置平衡;
①探究杠杆平衡条件实验前,要调节杠杆在水平位置平衡,调节的方法是哪端高,平衡螺母向哪端调节,图中杠杆左端下沉,故应将平衡螺母向右调节,直到杠杆在水平位置平衡。
水平
右
第1节 杠杆
②如图乙所示,杠杆上刻度均匀,在A点挂3个钩码,要使杠杆在水平位置平衡,应在B点挂_____个相同的钩码;当杠杆平衡后,将A、B两点下方同时增加一个相同的钩码,则杠杆将__________(选填“左端下沉”、“右端下沉”或“仍保持静止不动”);
②据杠杆的平衡条件F1l1=F2l2,设杠杆的1格长为L,每个钩码重力为G,则左边力与力臂乘积为3G×4L=12GL.右边力臂长为3L,故所挂钩码重为: 故右边B点处应挂4个钩码,杠杆在水平位置平衡。
当杠杆平衡后,将A、B两点下方同时增加一个相同的钩码,由于左边的力臂大于右边力臂,可知两边增加的力与力臂乘积左边大于右边,故杠杆将左端下沉。
4
左端下沉
第1节 杠杆
③如图丙所示,若不在B点挂钩码,改用弹簧测力计在C点竖直向上拉杠杆,使杠杆在水平位置平衡;当弹簧测力计从图丙位置转到图丁位置时,其示数会______(选填“变大”、“不变”或“变小”),原因是____________。
③若不在B点挂钩码,改用弹簧测力计在C点竖直向上拉杠杆,使杠杆在水平位置平衡;当弹簧测力计从图丙位置转到图丁位置时,拉力的力臂逐渐减小,由阻力和阻力臂的乘积不变,可得弹簧测力计示数将变大。
变大
力臂变小
第1节 杠杆
【例题3】如图所示是小明同学做俯卧撑时的示意图,他的质量为56kg,身体可视为杠杆,O点为支点,A点为重心。(g=10N/ kg)(1)该同学所受重力是多少?(2)在图中画出该同学所受重力的示意图,并画出重力的力臂l1;(3)若OB=1.0m,BC=0.4m,求地面对双手支持力的大小。
解析见下页
第1节 杠杆
(1)该同学的重力 G=mg=56 kg ×10N/ kg=560N(2)该同学所受重力的示意图如下,以O点为支点,过O点作重力作用线的垂线段,即为重力的力臂l1.(3)地面对双手支持力F的方向竖直向上,其力臂长度为 OC=OB+ BC=1.0m+0.4m=1.4m 根据杠杆的平衡条件得 G·OB=F ·OC 可得
第1节 杠杆
【例题4】如图所示,两个和尚用轻质扁担抬水,水桶和水的总重力为200 N。扁担在水平位置平衡时,水桶细绳悬挂点与甲和尚肩上支撑点距离为0.8米,距乙和尚肩上支撑点为1.2米。(g=10 N/kg)求:(1)水桶和水的总质量;(2)乙和尚对扁担的支持力;(3)当乙和尚独自把肩膀往后挪(增加肩上支撑点与桶细绳悬挂点的距离),则甲和尚对扁担的支持力有何变化?(只需回答结果,不必写出原因)
解析见下页
第1节 杠杆
【例题4】水桶和水的总重力为200 N。扁担在水平位置平衡时,水桶细绳悬挂点与甲和尚肩上支撑点距离为0.8m,距乙和尚肩上支撑点为1.2m(g=10 N/kg)。求:(1)水桶和水的总质量;(2)乙和尚对扁担的支持力;
第1节 杠杆
(3)当乙和尚独自把肩膀往后挪(增加肩上支撑点与桶细绳悬挂点的距离),则甲和尚对扁担的支持力有何变化?(只需回答结果,不必写出原因)
(3)以甲和尚肩为支点,当乙和尚独自把肩膀往后挪,乙的力臂l乙变大,水桶重力G不变,桶重力的力臂l桶不变,根据F乙l乙=Gl桶,乙对扁担支持力F乙变小。因为甲、乙对扁担支持力之和为水桶总重是不变F甲+F乙=G桶,乙对扁担支持力减小,甲对扁担支持力就增大。
第1节 杠杆
第2节 滑轮
知识结构
第2节 滑轮
定滑轮、动滑轮、滑轮组的比较 (不计绳重、摩擦)
F=G
s=h
不省力不省距离能改变力的方向
s=2h
省力、费距离,不能改变力的方向
s=nh(n为动滑轮上绳子段数)
省力、费距离,能否改变力的方向和绕线方式有关
① 定滑轮:使用时,轴固定不动的滑轮,叫定滑轮。
② 定滑轮的特点
1. 定滑轮
定滑轮
F
G
知识点一、定滑轮和动滑轮
第2节 滑轮
③定滑轮的实质——等臂杠杆
如图所示,定滑轮的轴心O为支点,动力臂l1与阻力臂l2都是滑轮的半径r。
F=G
F1l1=F2l2
l1=l2=r
Fl1=Gl2
通过理论分析可知,定滑轮实质上是一个等臂杠杆,所以不省力。
知识点一、定滑轮和动滑轮
第2节 滑轮
④用平衡力的知识研究定滑轮的特点
在忽略摩擦的情况下,物体受到重力G和拉力F的作用。由于物体匀速上升,所以拉力F跟物体的重力G是一对平衡力,大小相等: F=G
使用定滑轮不省力,可以改变力的方向。
物体向上运动,用力却是往下拉,所以使用定滑轮能改变力的方向.
知识点一、定滑轮和动滑轮
第2节 滑轮
①动滑轮:工作时,轴随着物体移动的滑轮叫动滑轮。
2. 动滑轮
②动滑轮的特点
动滑轮
S绳=2h物
F
G
知识点一、定滑轮和动滑轮
第2节 滑轮
③动滑轮的实质
动滑轮的实质是一个动力臂为阻力臂二倍的杠杆。
动滑轮相当于一根杠杆,支点在绳和轮相切的A处;拉力F是动力,重物的拉力是阻力G;动力臂l1是轮直径、阻力臂l2是轮半径。
根据杠杆的平衡条件:Fl1=Gl2
知识点一、定滑轮和动滑轮
第2节 滑轮
④用平衡力的知识研究动滑轮的特点
G动
知识点一、定滑轮和动滑轮
第2节 滑轮
①滑轮组:将定滑轮和动滑轮组合在一起就组成了滑轮组。
不计绳重和摩擦但考虑滑轮重:
1. 滑轮组
②滑轮组的特点:
知识点二、滑轮组
第2节 滑轮
2. 滑轮组的组装与设计
知识点二、滑轮组
第2节 滑轮
①轮轴:由具有共同转动轴的大轮和小轮组成。大轮叫轮,小轮叫轴。
根据杠杆的平衡条件: F1l1 = F2l2
当动力作用在轴上时,轮轴是一个费力杠杆,但省距离。
∵ R >r,∴ F
1. 轮轴
②轮轴可以看成一个可连续转动的不等臂杠杆。支点在轴心0,轮半径R是动力臂,轴半径r阻力臂。
当动力作用在轮上时,轮轴是一个省力杠杆,但费距离。
知识点三、轮轴和斜面
第2节 滑轮
①斜面的原理
如果不计摩擦,斜面长是斜面高的几倍,拉力就是物体重力的几分之一。斜面是一种省力的机械。
如图,把重为G的物体,沿着长为L,高为h的斜面,用力F拉上去的过程中:
沿斜面向上的推力:
2. 斜面
知识点三、轮轴和斜面
第2节 滑轮
视频总结——《滑轮的几种用法分析》
A
第2节 滑轮
【例题2】用如图所示的滑轮组吊起重500 N的重物。已知绳子能承受的最大拉力为200 N,请画出绕绳的方法(不计滑轮重与摩擦)。
滑轮组吊起重500 N的重物,已知绳子能承受的最大拉力为200 N,则绳子段数为n=500N/200N=2.5=3。n为奇数,则绳子的固定端挂在动滑轮上。
第2节 滑轮
【例题3】工人用如图所示的滑轮组运送建材上楼,每次运送量不定,滑轮与钢绳间的摩擦力及绳重忽略不计。若某一次工人将重800N的建材匀速竖直向上提升了6m,所用的拉力为300N,求:(1)动滑轮的重力;(2)钢绳自由端移动的距离;(3)当所运送建材的重为1100N时,工人作用在绳子上的拉力。
第2节 滑轮
解析见下页
第2节 滑轮
【例题4】如图,两个滑轮组,提升一个重为17N的物体A(每个滑轮重相同),使物体A在2s内拉升了20cm,拉力如图所示,下列说法正确的是( )A.甲中,绳端移动的距离为60cm B.乙中,拉力的速度为0.3m/sC.甲中,动滑轮由两根绳子吊着 D.乙中,动滑轮的重力为2N
第2节 滑轮
解析见下页
AC.甲图中,动滑轮由三根绳子吊着,故C错误;物体A在2s内拉升了20cm,则甲中绳端移动的距离是物体A上升的高度三倍,即 S甲=3h甲=3×20cm=60cm,故A正确.B.乙图绳端的拉力是9N,两条绳子托着动滑轮,则乙中绳端移动的距离是物体A上升的高度两倍,即S乙=2h乙=2×20cm=40cm=0.4m,时间t=2s,乙中绳端移动的速度v乙= S乙 / t乙= 0.4m/2s =0.2m/s ,故B错误.
第2节 滑轮
D.乙图绳端的拉力是9N,n=2,设动滑轮的重力G动,物体A的重力是17N,则2F乙= G动+ GA 得2×9N= G动+17N 解得G动=1N. 故D错误。所以选A。
第3节 机械效率
知识结构
机械效率
有用功W有:为完成目的必须做的功
额外功W额:为完成目的,不需要但又不得不做的功
总功W总:有用功和额外功总和 W总=W有+W额
(不用机械时人做的功)
(机械自重或摩擦阻力做功)
(使用机械时人做的功)
功的原理:使用任何机械都不省功
机械效率η:有用功与总功的百分比.
特点:使用机械做功时,总存在额外功,故机械效率总小于1.
机械效率
公式:
提高滑轮组机械效率的方法
增大物体的重力(W有增大,W额不变,η变大)
减小动滑轮的重力(W有不变,W额减小,η变大)
第3节 机械效率
知识点一、有用功和额外功
第3节 机械效率
(以使用动滑轮提升钩码进行分析)
②额外功 要提升钩码,必须将动滑轮和绳子也提升,同时还要克服摩擦做功。这些功:是对人们无用但又不得不做的功叫做额外功。
①有用功 提升钩码是目的,有利用价值,对钩码做的功:是为完成目的必须做的功叫做有用功。
③总功 人做的功为总功 W总=Fs,有用功与额外功之和:W总=W有+W额
1. 机械的三种功
①物理学中,将有用功跟总功的比值叫做机械效率。
注:机械效率只有大小,没有单位。由于有用功总小于总功,所以机械效率总小于1 。机械效率通常用百分数表示。
机械效率是标志机械做功性能好坏的重要指标,机械效率越高,机械的性能越好。
③变形公式:
W有= W总η
②计算公式:
1. 机械效率 η
知识点二、机械效率
第3节 机械效率
2. 杠杆的机械效率
如图所示,利用杠杆把重力为G的物体提高h,F 为动力,s为动力作用点移动的距离。
知识点二、机械效率
第3节 机械效率
3. 滑轮组的机械效率
由公式可知: 当动滑轮的重力一定时,物重越大,机械效率越高。
如图所示,利用滑轮组把重力为G的物体提高h。F 为动力,s为绳子自由端移动的距离,n为承担重物的绳子股数。
知识点二、机械效率
①竖直提升重物
第3节 机械效率
②滑轮或滑轮组水平拉动物体(不计滑轮及绳重)
知识点二、机械效率
第3节 机械效率
4. 斜面的机械效率
如图所示,用力F沿斜面把重力为G的物体提高,h为斜面的高度,l为斜面的长度。f 为物体与斜面间的摩擦力。
知识点二、机械效率
第3节 机械效率
知识点三、测量滑轮组的机械效率
设计和进行实验
测量的物理量:拉力F及移动的距离S;物重G及升高的距离h。
第3节 机械效率
③实验方法:控制变量法
知识点三、测量滑轮组的机械效率
第3节 机械效率
进行实验
①按照图甲那样安装滑轮组,算出钩码的重力G,并记下钩码和绳端的位置。
②如图乙,匀速竖直缓慢拉动弹簧测力计,使钩码缓慢上升,读出拉力F的值,并用刻度尺测出钩码上升的高度h和绳端移动的距离s。
④改变钩码的数量,再做两次上面的实验。
1. 探究滑轮组的机械效率与物体重力的关系
知识点三、测量滑轮组的机械效率
第3节 机械效率
分析和论证
60.6%
71.4%
78.4%
实验结论:同一滑轮组,提升物体的重力越大,机械效率越高。
数据分析:三次实验中的机械效率不同。同一滑轮组,钩码的重力越大,机械效率越高。
知识点三、测量滑轮组的机械效率
第3节 机械效率
①按照图甲安装滑轮组,用弹簧测力计测量动滑轮A重力GA,分别记下钩码和绳端的位置。②匀速缓慢拉动弹簧测力计,使钩码升高,读出拉力F的值,用刻度尺测出钩码上升的高度h和绳端移动的距离s,将测量数据填入表格。③如图乙所示,改变动滑轮的重力,换用动滑轮B,重复上述实验。④算出有用功W有、总功W总、机械效率η,并填入表格。
2. 探究滑轮组的机械效率与动滑轮重力的关系
知识点三、测量滑轮组的机械效率
进行实验
第3节 机械效率
钩码的重力G码=3N
64.5%
53.0%
知识点三、测量滑轮组的机械效率
分析和论证
第3节 机械效率
实验结论:不同的滑轮组提高重力相同的物体,动滑轮的重力越大,机械效率越低。
数据分析:两次实验中的机械效率不同。不同滑轮组,所提钩码的重力相同,动滑轮的重力越大,机械效率越低。
同一滑轮组,提升物体重力的越大,机械效率越高; 不同滑轮组提升重力相等的物体,动滑轮重力越小,机械效率越高。
综合以上实验,归纳得出结论:
知识点三、测量滑轮组的机械效率
第3节 机械效率
①实验时拉力的方向应尽量____________,应在钩码__________的过程中读取拉力的大小。
竖直向上
匀速移动
②确定绕线方式与承担重物绳子的段数n:与动滑轮连接的段数即为承担重物绳子的段数,如图所示,n=3,用“奇动偶定法”确定绕线方式。③影响滑轮组机械效率的因素:物体的 、动滑轮的________、绳子与滑轮之间的摩擦力。与绳子的绕法、绳子段数________。
交流、反思与评估
重力
重力
无关
知识点三、测量滑轮组的机械效率
第3节 机械效率
摩擦
刻度尺
知识点三、测量滑轮组的机械效率
交流、反思与评估
第3节 机械效率
影响滑轮组机械效率的因素和改进措施
被提升物体的重力
动滑轮自身的重力
滑轮组自身部件的摩擦
同一个滑轮组,被提升物体的重力越大,做的有用功越多,机械效率越大
有用功不变时,减小提升动滑轮时做的额外功,可提高机械效率
机械自身部件的摩擦力越大,机械效率越低
在机械承受的范围内,尽可能增加被提升物体的重力
改进滑轮结构,减轻滑轮自重
对机械进行保养,保持良 好的润滑,减小摩擦
知识点四、提高机械效率的方法
第3节 机械效率
课堂总结——《第3节 机械效率》
【例题1】如图6所示,在斜面上将一个重为15 N的物体匀速从斜面底端拉到顶端,沿斜面向上的拉力F=6 N,斜面长s=1.2 m、斜面高h=0.3 m。下列说法正确的是( )
A.克服物体重力做功7.2 J B.额外功为1.8 JC.物体受到的摩擦力为2.25 N D.斜面的机械效率为37.5 %
C
解析见下页
第3节 机械效率
A. 克服物体重力做功:W有=Gh=15N×0.3m=4.5J,故A错误;B. 拉力做的总功:W总=Fs=6 N×1.2 m=7.2 J, 则额外功:W额=W总-W有=7.2 J-4.5 J=2.7J,故B错误;C. 物体受到的摩擦力:f=W额/s=2.7J/1.2m=2.25N,故C正确;D. 斜面的机械效率:η=W有/W总=4.5J/7.2J=62.5%,故D错误。
所以选C
A.克服物体重力做功7.2 J B.额外功为1.8 JC.物体受到的摩擦力为2.25 N D.斜面的机械效率为37.5 %
第3节 机械效率
【例题2】用相同的两个滑轮按如图两种方式组装,将重为G的重物(物重大于滑轮重)在相同的时间内匀速竖直提升相同的高度h,则拉力大小关系:F1_____F2,拉力做功大小关系:W1_____W2,绳子自由端移动的速度关系:v1____v2,两滑轮的机械效率关系:η1____η2。(均选填“>”、“<”或“=”)(不计绳重及摩擦)
<
>
>
<
解析见下页
第3节 机械效率
第3节 机械效率
(1)在实验过程中,小明应______________向上拉动弹簧测力计;(2)小明做实验测量的有关数据如表,其中第1次实验的拉力读数如图乙所示,则第1次实验的拉力为______N,第3次实验的机械效率为______;
【例题3】如图甲所示是小明“测量滑轮组的机械效率”的装置。
沿竖直方向匀速
0.6
83.3%
解析见下页
第3节 机械效率
第3节 机械效率
(3)分析表中的测量结果,得到的结论是:同一滑轮组,提升的物体越重,滑轮组的机械效率越______;(4)该实验要进行三次测量其目的是_________________(填“取平均值减小误差”或“得到的结论具有普遍性”);
大
得到的结论具有普遍性
(3)从第1次实验到第3次实验,钩码的重力不断增加,机械效率不断提高,故可得出结论:同一滑轮组,提升的物体越重,滑轮组的机械效率越大。(4)为避免实验的偶然性,寻找普遍规律,得出结论,实验需要进行多次。
第3节 机械效率
(5)为了提高滑轮组机械效率,根据所学知识和生活经验,可采取的措施有__________。A.减轻动滑轮重 B.增加所提物体重C.机械加润滑油 D.增加重物上升高度
ABC
ABC.由 可知,要想提高机械效率,可以增加有用功,减小额外功。减轻动滑轮重,可以减少克服动滑轮重做的额外功;机械加润滑油,可以减少克服摩擦所做的额外功;增加物重,可以增加有用功。以上都可以提高机械效率。故ABC符合题意; D.由 可知,机械效率大小与重物上升高度无关。故D不符合题意。
故选ABC。
第3节 机械效率
【例题4】工人利用如图所示的滑轮组将重900 N的物体竖直向上匀速提升0.5 m,工人所用的拉力F为600 N,(不计摩擦和绳重),求:①人的拉力做的功为多少焦?②此滑轮组的机械效率为多少?③若用此滑轮组提升重为1500N的物体,拉力F是多大?
解析见下页
第3节 机械效率
第3节 机械效率
相关资料
更多







