资料中包含下列文件,点击文件名可预览资料内容
还剩16页未读,
继续阅读
所属成套资源:川教版信息技术九年级下册课件PPT+教案全册
成套系列资料,整套一键下载
川教版(2019)九年级下册第2节 安全消防机器人优质课件ppt
展开
这是一份川教版(2019)九年级下册第2节 安全消防机器人优质课件ppt,文件包含川教版九年级下册信息技术22《安全消防机器人》课件pptx、川教版九年级下册信息技术22《安全消防机器人》教案doc等2份课件配套教学资源,其中PPT共24页, 欢迎下载使用。
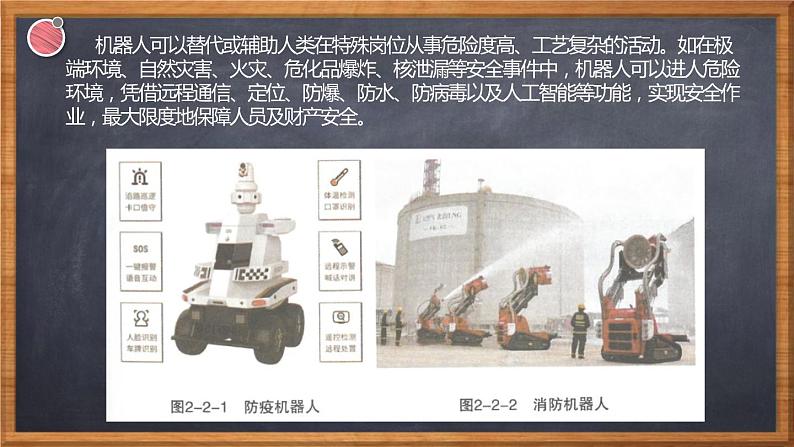
机器人可以替代或辅助人类在特殊岗位从事危险度高、工艺复杂的活动。如在极端环境、自然灾害、火灾、危化品爆炸、核泄漏等安全事件中,机器人可以进人危险环境,凭借远程通信、定位、防爆、防水、防病毒以及人工智能等功能,实现安全作业,最大限度地保障人员及财产安全。
请说说在城市生活中,存在哪些安全问题,面对这些问题,你有解决的思路吗?
1、需求分析
欢欢组在进一步探索末来城市时,发现消防机器人功能强大。于是,通过对未来城市消防员的了解与学习,他们准备着手搭建一个城市消防员——消防机器人。
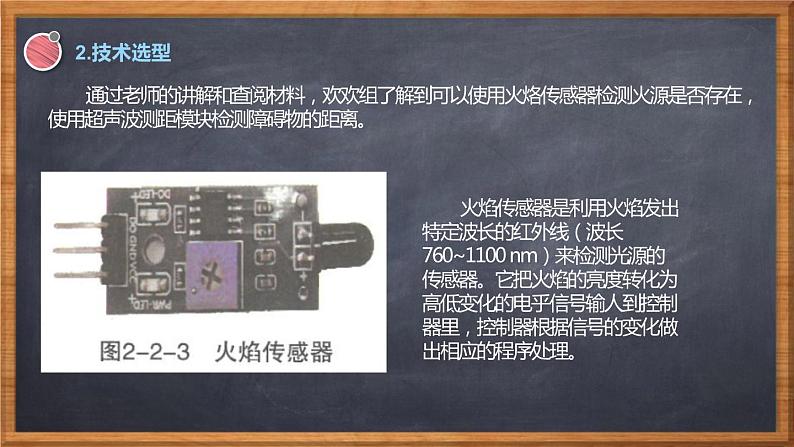
通过老师的讲解和查阅材料,欢欢组了解到可以使用火烙传感器检测火源是否存在,使用超声波测距模块检测障碍物的距离。
火焰传感器是利用火焰发出特定波长的红外线(波长760~1100 nm)来检测光源的传感器。它把火焰的亮度转化为高低变化的电乎信号输人到控制器里,控制器根据信号的变化做出相应的程序处理。
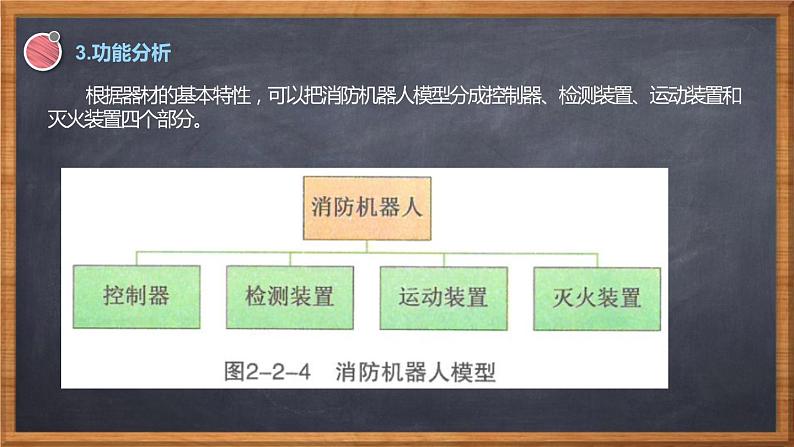
根据器材的基本特性,可以把消防机器人模型分成控制器、检测装置、运动装置和灭火装置四个部分。
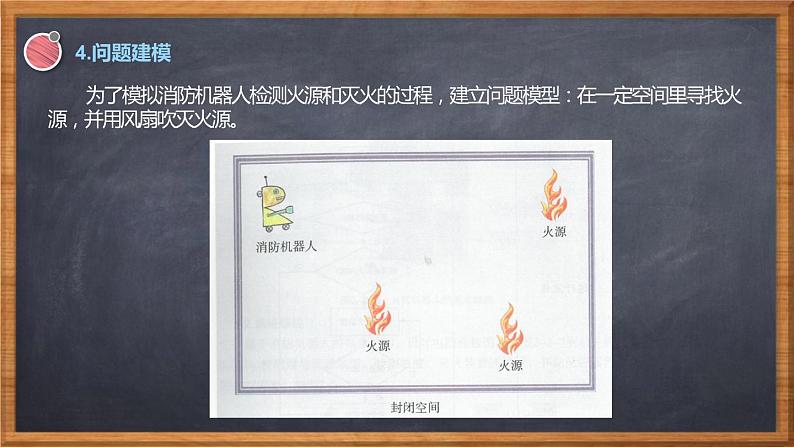
为了模拟消防机器人检测火源和灭火的过程,建立问题模型:在一定空间里寻找火源,并用风扇吹灭火源。
1、结构搭建
根据设计方案,搭建消防机器人的基础结构,并安装好火焰传感器、超声波测距模块、电机驱动模块等。
基于消防机器人的基本结构,设计电路连接图(如图2-2-7所示)将Arduin控制器与运动装置、检测装置、灭火装貴连接好,并记录好器件针脚对应表,如表2-2-2所示。
在设计较复杂的程序时,程序员往往会将一个复杂的程序按照功能划分为若干个小的程序模块。每个小的程序模块实现一个确定的功能,并在这些模块之间建立必要的联系。通过模块的互相协作完成整个功能,这种程序设计的方式称为模块化的程序设计。
问题模型中,消防机器人在一个封闭的空间内运动,消防机器人行进的动作分为直行、后退、左转、右转和停止。应用模块化的编程思想,编写子模块函数。
超声波测距模块用于检测障碍物与消防机器人的距离,在调试时可以使用串口打印功能测试超声波测距模块的运行情况,如图2-2-9所示。
请设计实验,检测超声波测距模块的灵敏度,以及它在不同场景和障碍物存在的情况下测量距离的精度情況。
在能正确检测障碍物的距离后,欢欢他们就开始着手设计机器人小车的避障功能,下面是一种简单的避障算法,如图2-2-10所示。
小提示:障碍物距离参数和后退、左转的时间参数需要根据电机和环境情況反复调试与优化。
你认为上面的避障算法有需要政进的地方吗?请根据设计的算法画出相应的流程图,并编写程序上传到消防机器人以验证算法的正确性与避障效率。
灭火动作由风扇吹灭火焰来模拟,可以将灭火动作设计为启动电机带动风扇灭火和停止风扇灭火两个函数。
火源用火焰传感器检测:火焰传感器DO针脚输出为数宇信号,信号为“0”时表示检测到火焰,为“I〞时表示未检测到火焰。那么火源的检测及灭火动作的程序如图2-2-13。
图2-2-13中的程序使用了循环语句和条件语句,当检测到火源时(8号管脚读人的数值为“”时)则循环执行“utFire”函数,直到没有检测到火源时(8号管脚读人的数值为“1”时)则执行“stpOutFire”函数。
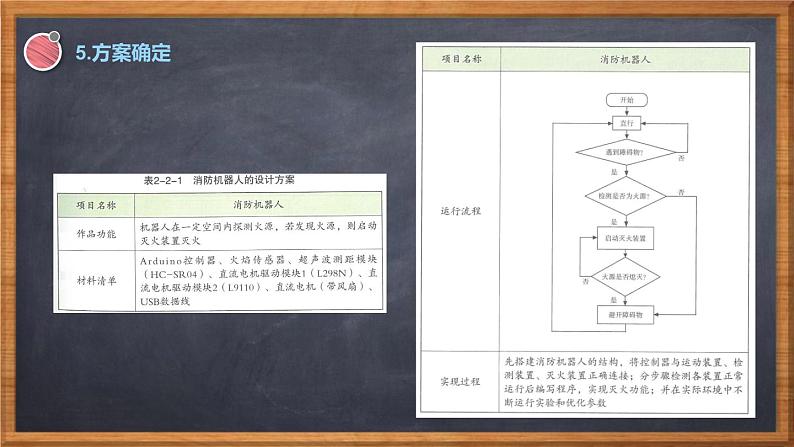
在前面程序模块设计和实验调试之后,将消防机器人按原先设计的算法流程图(如表2-2-1中所示)进行整合。
(三)、程序调试、实验优化
将程序上传至Arduin控制器,并将消防机器人放在实际模拟场景中,记录实验结果,实现消防机器人的主要功能。
通过实践,观察消防机器人是否存在问题,记录遇到的问题,并提出解决方案。
机器人可以替代或辅助人类在特殊岗位从事危险度高、工艺复杂的活动。如在极端环境、自然灾害、火灾、危化品爆炸、核泄漏等安全事件中,机器人可以进人危险环境,凭借远程通信、定位、防爆、防水、防病毒以及人工智能等功能,实现安全作业,最大限度地保障人员及财产安全。
请说说在城市生活中,存在哪些安全问题,面对这些问题,你有解决的思路吗?
1、需求分析
欢欢组在进一步探索末来城市时,发现消防机器人功能强大。于是,通过对未来城市消防员的了解与学习,他们准备着手搭建一个城市消防员——消防机器人。
通过老师的讲解和查阅材料,欢欢组了解到可以使用火烙传感器检测火源是否存在,使用超声波测距模块检测障碍物的距离。
火焰传感器是利用火焰发出特定波长的红外线(波长760~1100 nm)来检测光源的传感器。它把火焰的亮度转化为高低变化的电乎信号输人到控制器里,控制器根据信号的变化做出相应的程序处理。
根据器材的基本特性,可以把消防机器人模型分成控制器、检测装置、运动装置和灭火装置四个部分。
为了模拟消防机器人检测火源和灭火的过程,建立问题模型:在一定空间里寻找火源,并用风扇吹灭火源。
1、结构搭建
根据设计方案,搭建消防机器人的基础结构,并安装好火焰传感器、超声波测距模块、电机驱动模块等。
基于消防机器人的基本结构,设计电路连接图(如图2-2-7所示)将Arduin控制器与运动装置、检测装置、灭火装貴连接好,并记录好器件针脚对应表,如表2-2-2所示。
在设计较复杂的程序时,程序员往往会将一个复杂的程序按照功能划分为若干个小的程序模块。每个小的程序模块实现一个确定的功能,并在这些模块之间建立必要的联系。通过模块的互相协作完成整个功能,这种程序设计的方式称为模块化的程序设计。
问题模型中,消防机器人在一个封闭的空间内运动,消防机器人行进的动作分为直行、后退、左转、右转和停止。应用模块化的编程思想,编写子模块函数。
超声波测距模块用于检测障碍物与消防机器人的距离,在调试时可以使用串口打印功能测试超声波测距模块的运行情况,如图2-2-9所示。
请设计实验,检测超声波测距模块的灵敏度,以及它在不同场景和障碍物存在的情况下测量距离的精度情況。
在能正确检测障碍物的距离后,欢欢他们就开始着手设计机器人小车的避障功能,下面是一种简单的避障算法,如图2-2-10所示。
小提示:障碍物距离参数和后退、左转的时间参数需要根据电机和环境情況反复调试与优化。
你认为上面的避障算法有需要政进的地方吗?请根据设计的算法画出相应的流程图,并编写程序上传到消防机器人以验证算法的正确性与避障效率。
灭火动作由风扇吹灭火焰来模拟,可以将灭火动作设计为启动电机带动风扇灭火和停止风扇灭火两个函数。
火源用火焰传感器检测:火焰传感器DO针脚输出为数宇信号,信号为“0”时表示检测到火焰,为“I〞时表示未检测到火焰。那么火源的检测及灭火动作的程序如图2-2-13。
图2-2-13中的程序使用了循环语句和条件语句,当检测到火源时(8号管脚读人的数值为“”时)则循环执行“utFire”函数,直到没有检测到火源时(8号管脚读人的数值为“1”时)则执行“stpOutFire”函数。
在前面程序模块设计和实验调试之后,将消防机器人按原先设计的算法流程图(如表2-2-1中所示)进行整合。
(三)、程序调试、实验优化
将程序上传至Arduin控制器,并将消防机器人放在实际模拟场景中,记录实验结果,实现消防机器人的主要功能。
通过实践,观察消防机器人是否存在问题,记录遇到的问题,并提出解决方案。
相关课件
初中信息技术苏科版九年级全册1 项目分析备课ppt课件: 这是一份初中信息技术苏科版九年级全册1 项目分析备课ppt课件,文件包含机器人捡球ppt、机器人捡球教案+任务单doc等2份课件配套教学资源,其中PPT共14页, 欢迎下载使用。
信息技术九年级下册第2节 安防机器人的方案设计优质ppt课件: 这是一份信息技术九年级下册第2节 安防机器人的方案设计优质ppt课件,文件包含川教版九年级下册信息技术12《安防机器人的方案设计》课件pptx、川教版九年级下册信息技术12《安防机器人的方案设计》教案doc等2份课件配套教学资源,其中PPT共26页, 欢迎下载使用。
信息技术九年级下册第一单元 认识未来城市中的机器人第3节 安防机器人的制作实践图片ppt课件: 这是一份信息技术九年级下册第一单元 认识未来城市中的机器人第3节 安防机器人的制作实践图片ppt课件,文件包含川教版九年级下册信息技术13《安防机器人的制作实践》课件pptx、川教版九年级下册信息技术13《安防机器人的制作实践》教案doc等2份课件配套教学资源,其中PPT共35页, 欢迎下载使用。












