2022年全国职业院校技能大赛高职组 工业机器人技术应用赛项模拟赛题(Word版)
展开
2022年全国职业院校技能大赛
工业机器人技术应用赛项(高职组)
竞赛任务书(样题)
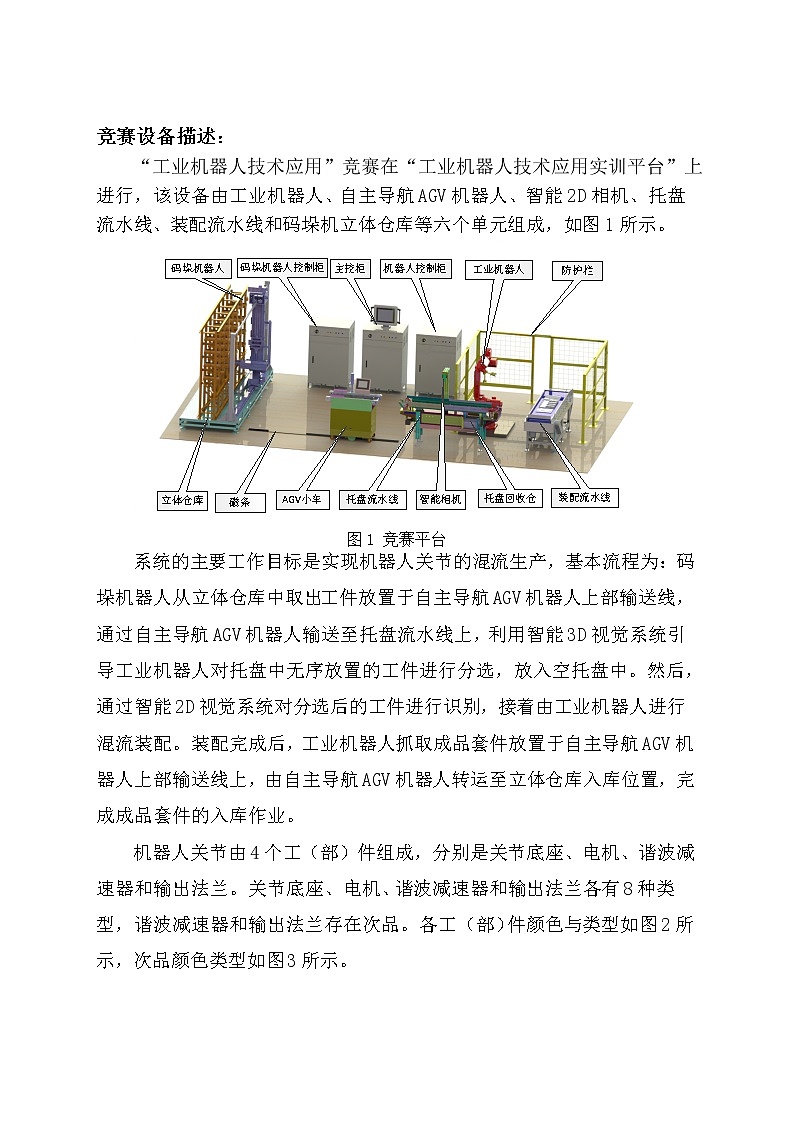
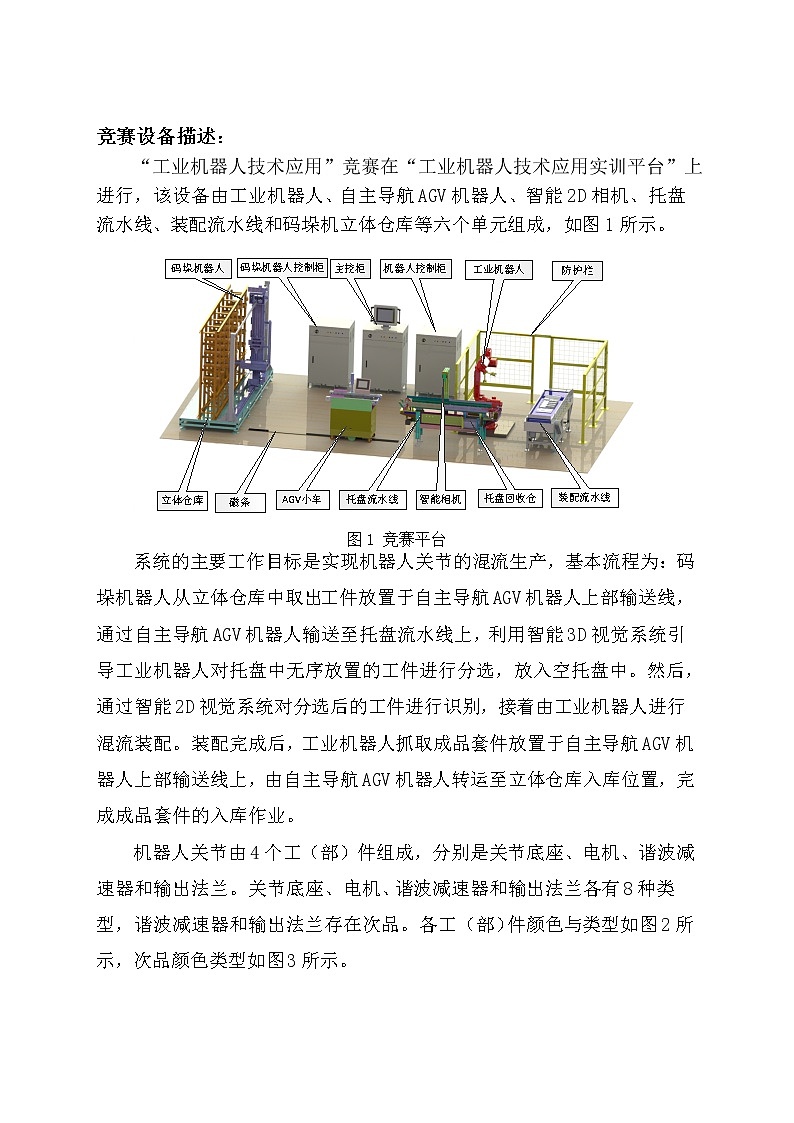
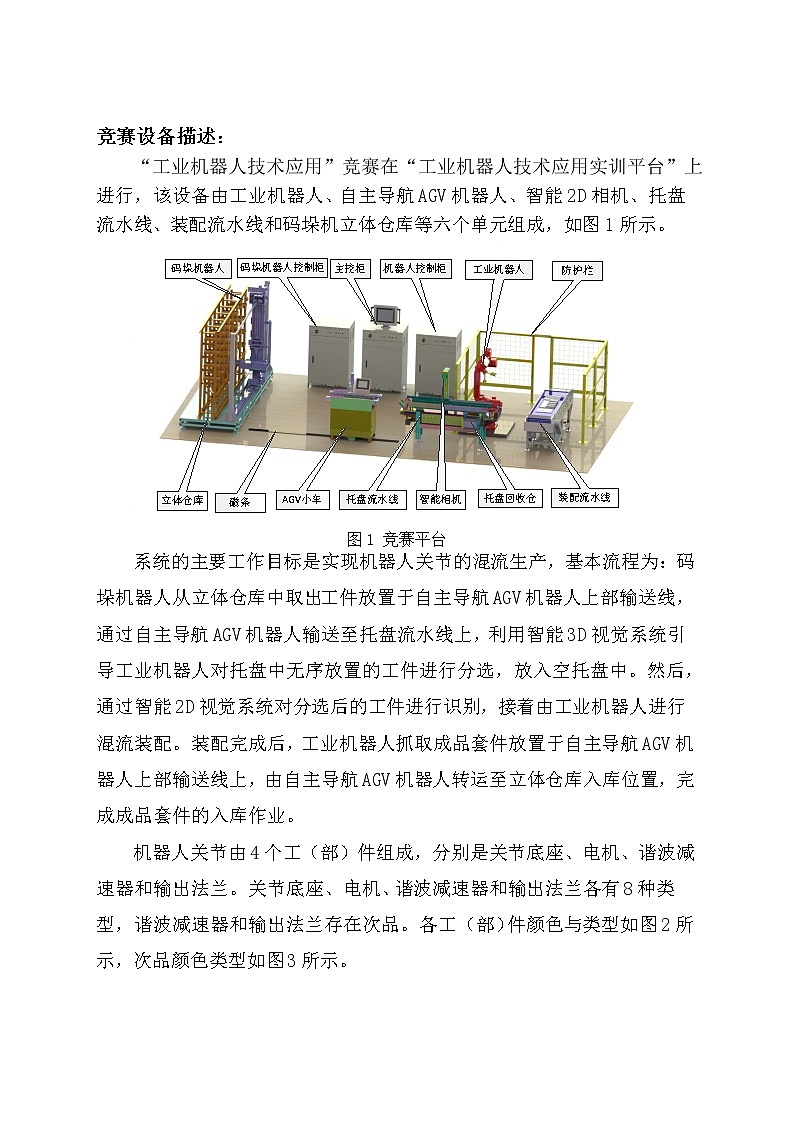
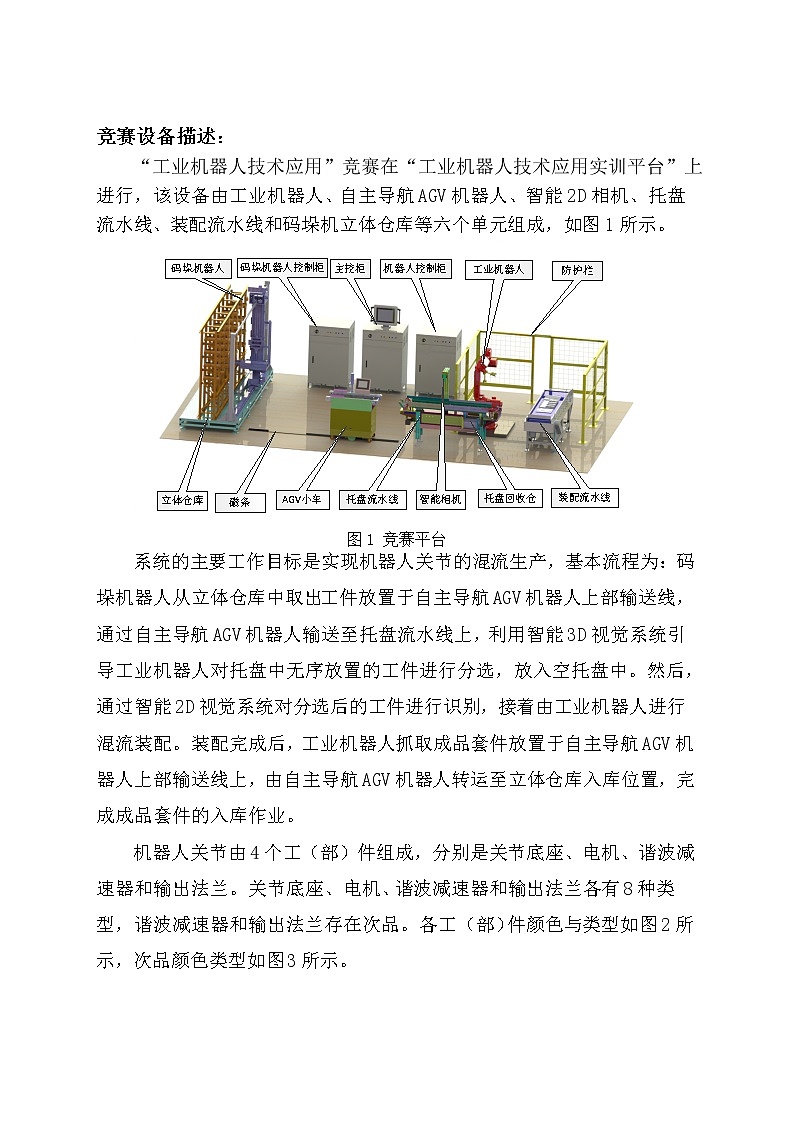
竞赛设备描述:
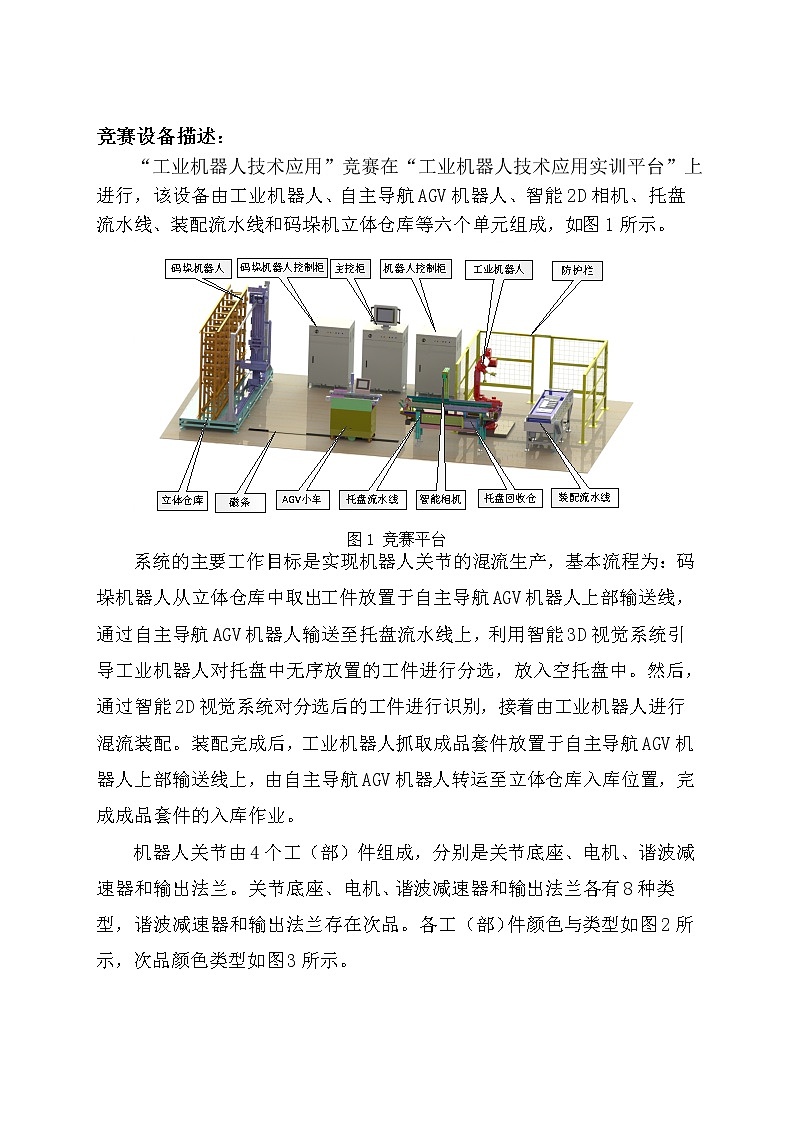
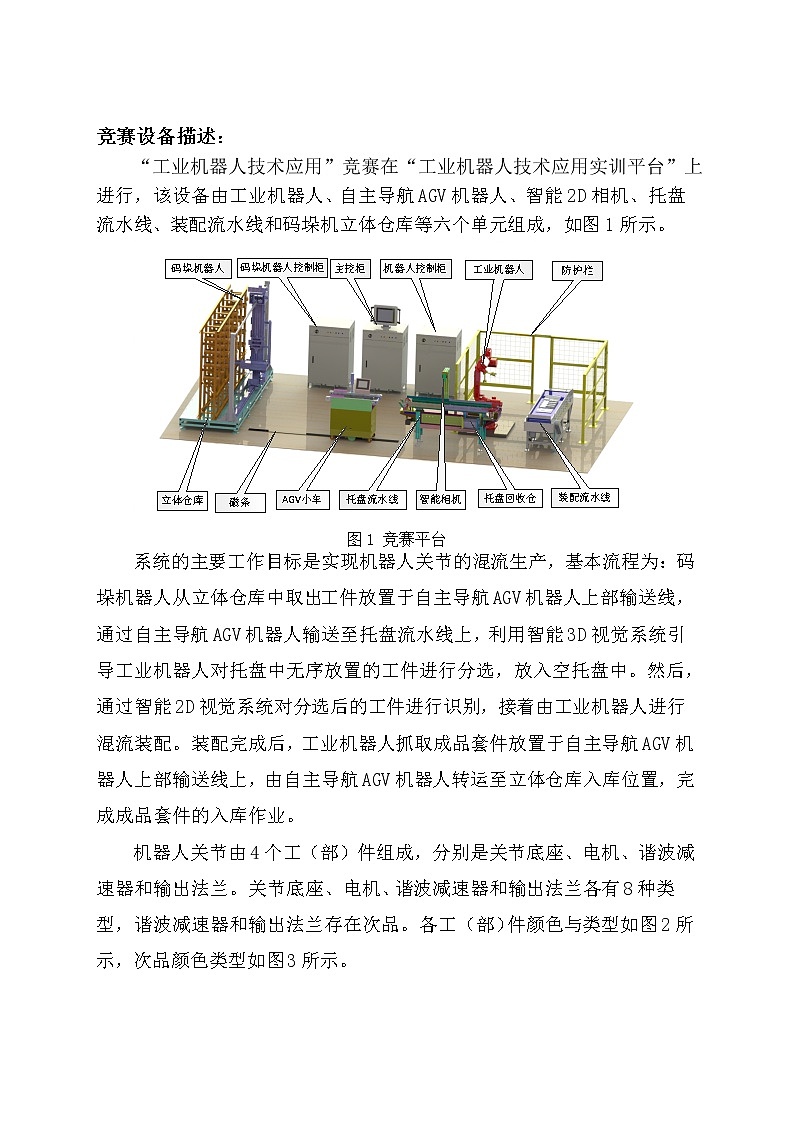
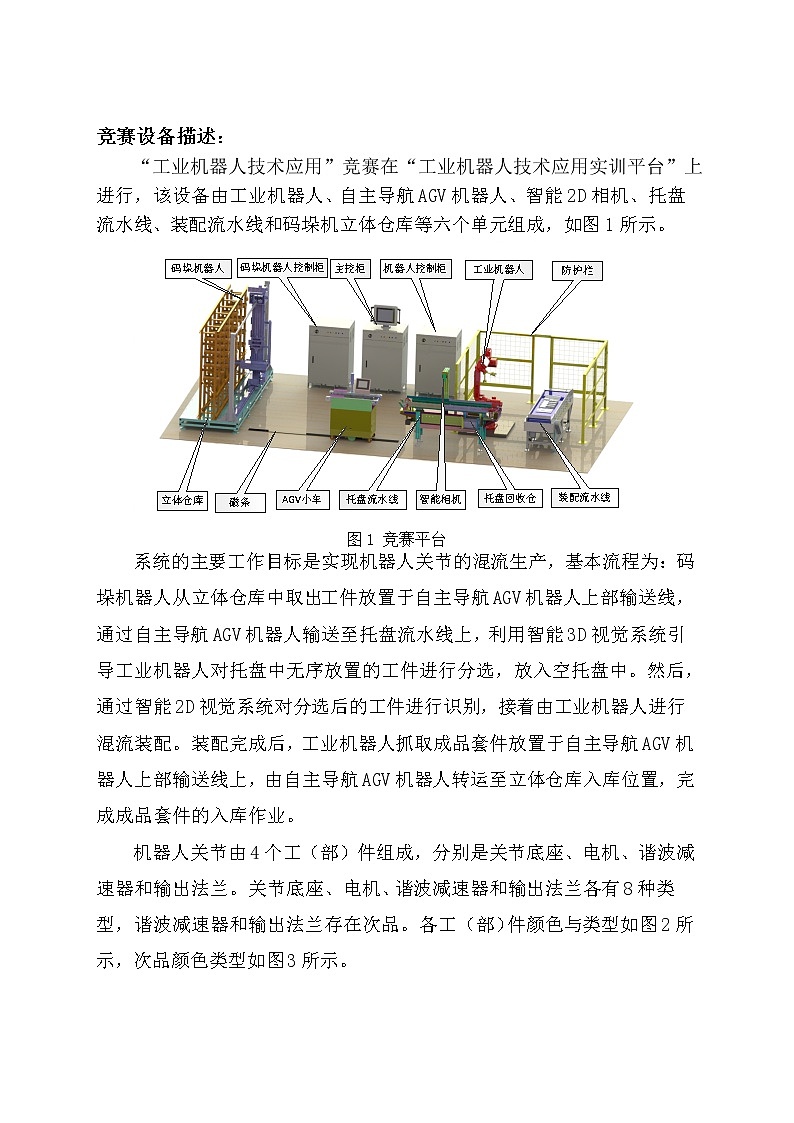
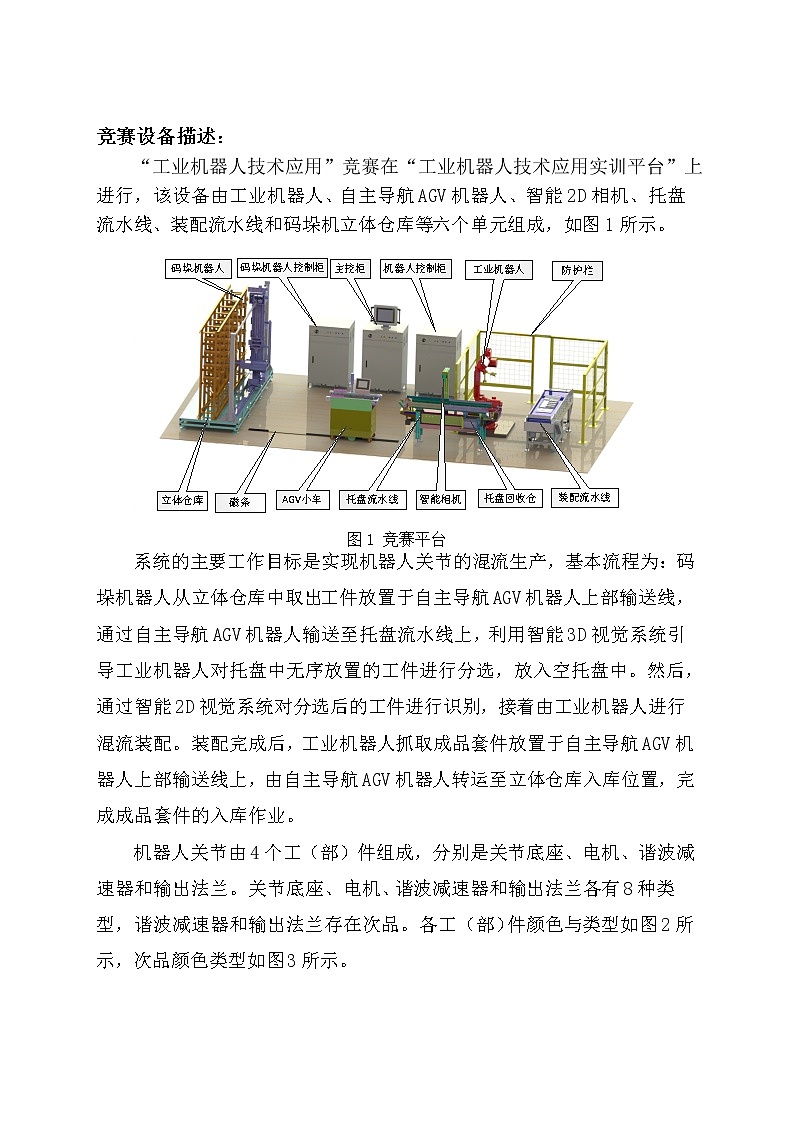
“工业机器人技术应用”竞赛在“工业机器人技术应用实训平台”上进行,该设备由工业机器人、自主导航AGV机器人、智能2D相机、托盘流水线、装配流水线和码垛机立体仓库等六个单元组成,如图1所示。
图1 竞赛平台
系统的主要工作目标是实现机器人关节的混流生产,基本流程为:码垛机器人从立体仓库中取出工件放置于自主导航AGV机器人上部输送线,通过自主导航AGV机器人输送至托盘流水线上,利用智能3D视觉系统引导工业机器人对托盘中无序放置的工件进行分选,放入空托盘中。然后,通过智能2D视觉系统对分选后的工件进行识别,接着由工业机器人进行混流装配。装配完成后,工业机器人抓取成品套件放置于自主导航AGV机器人上部输送线上,由自主导航AGV机器人转运至立体仓库入库位置,完成成品套件的入库作业。
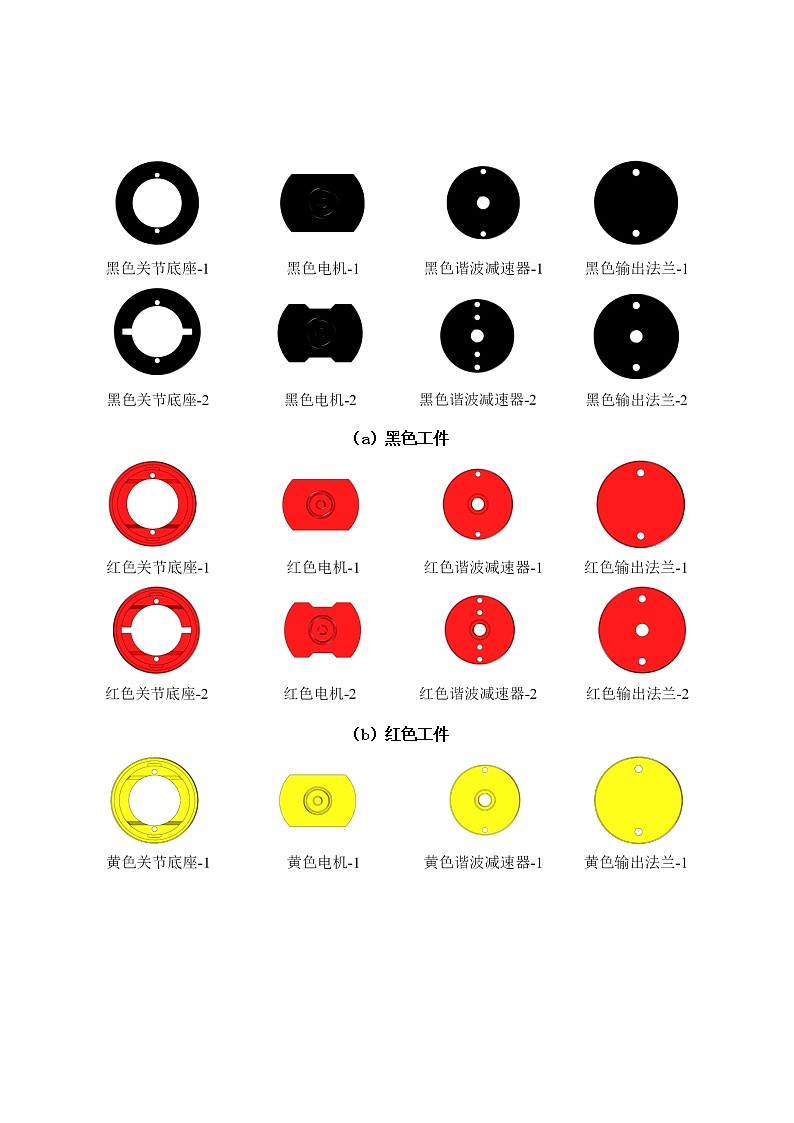
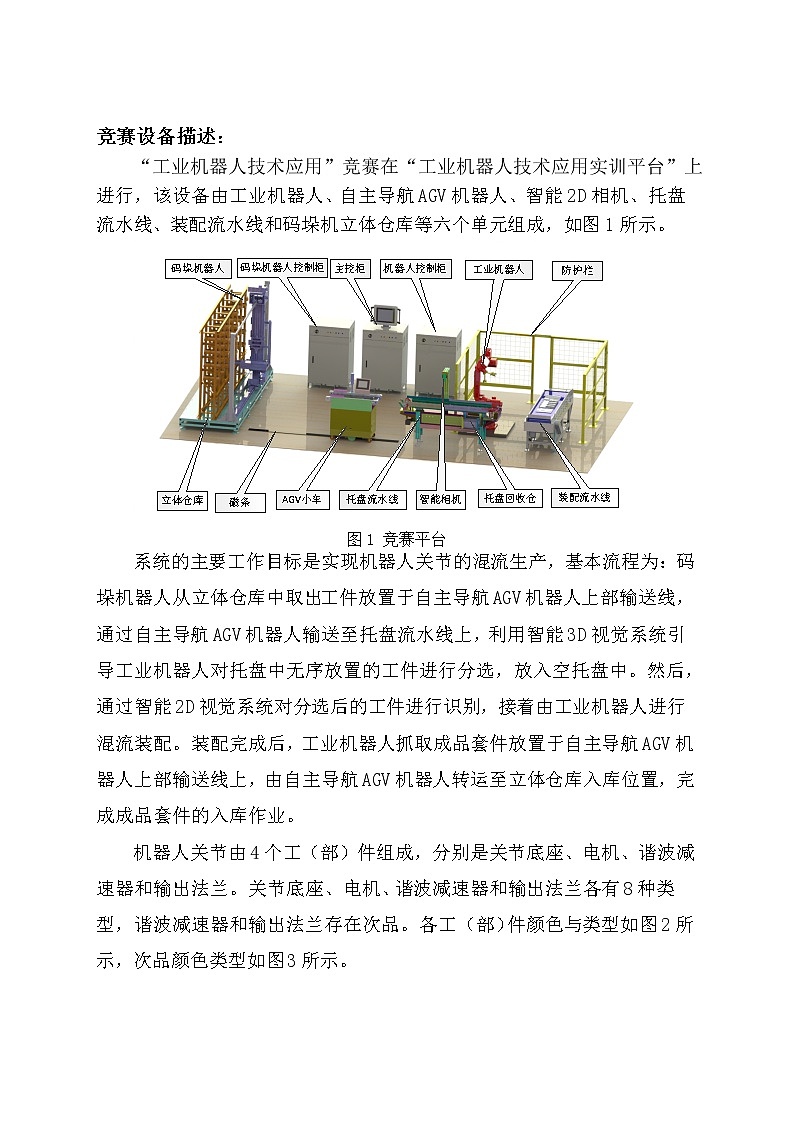
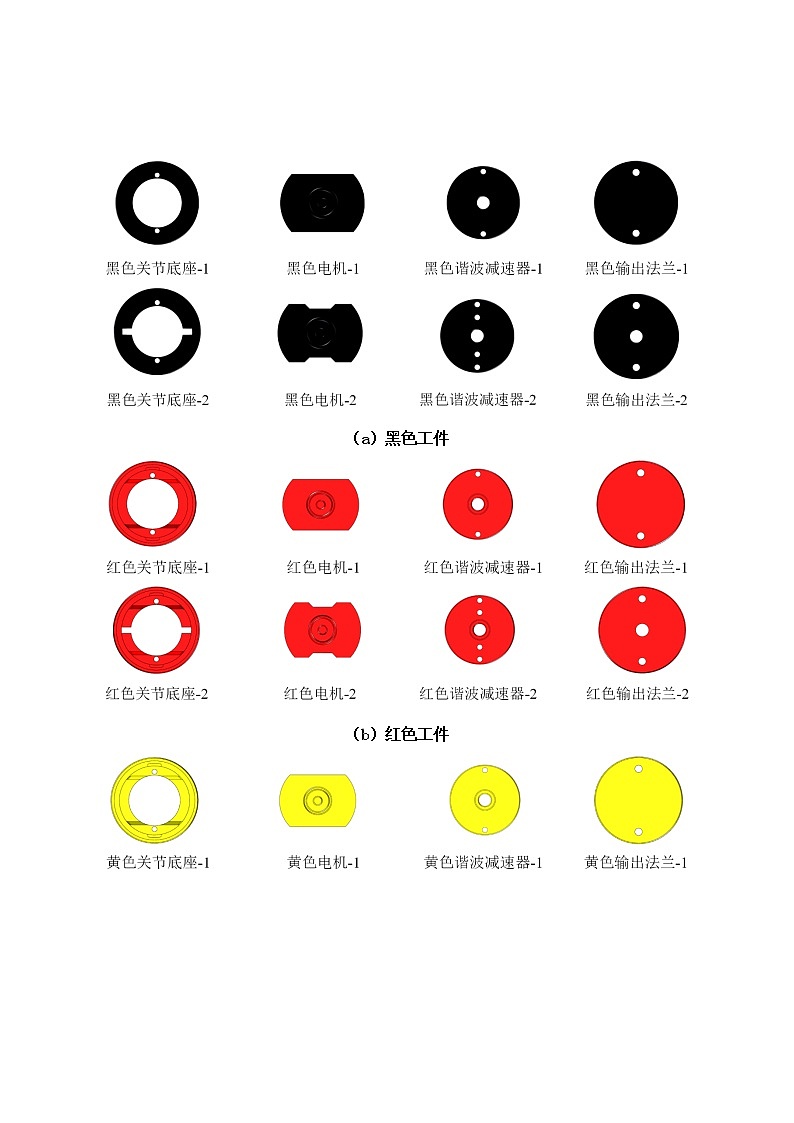
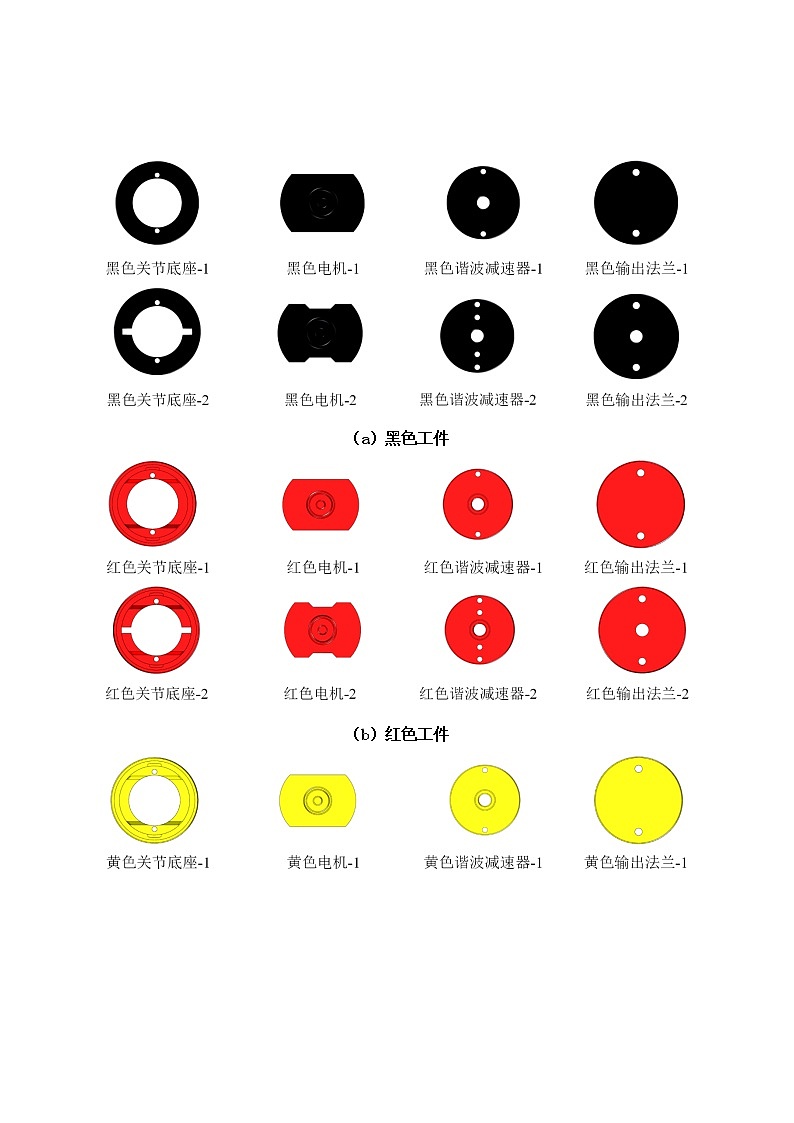
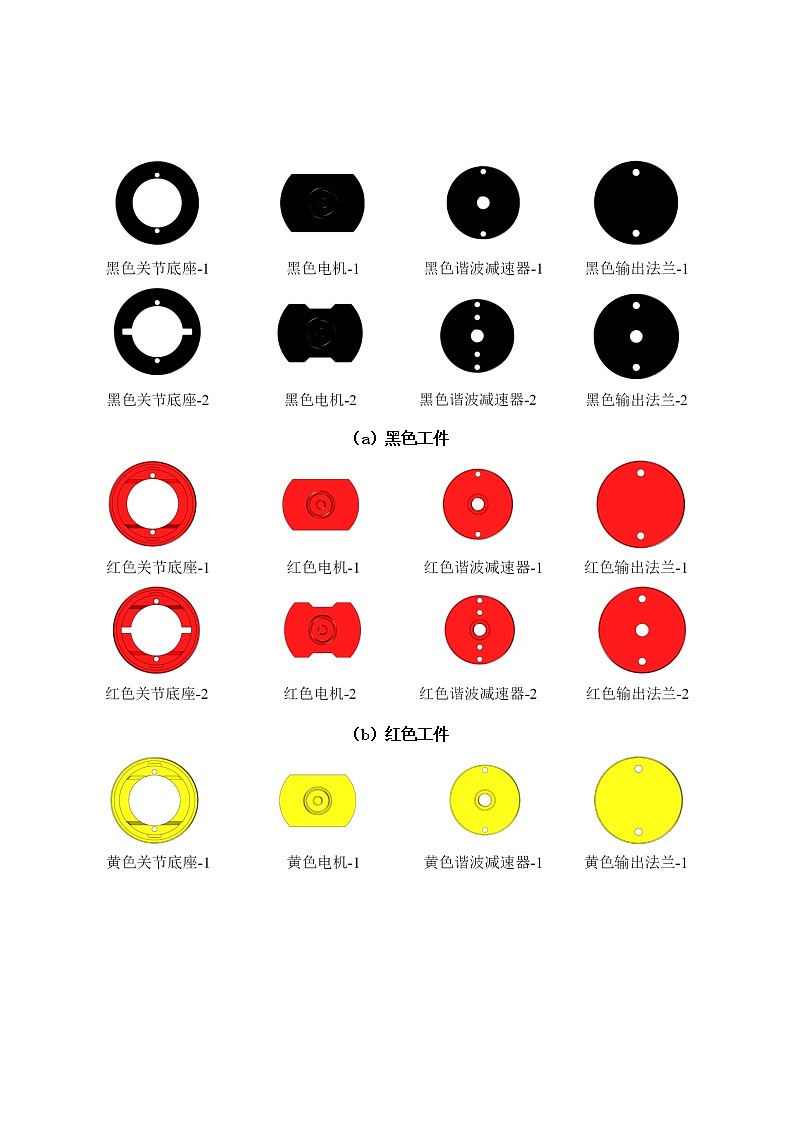
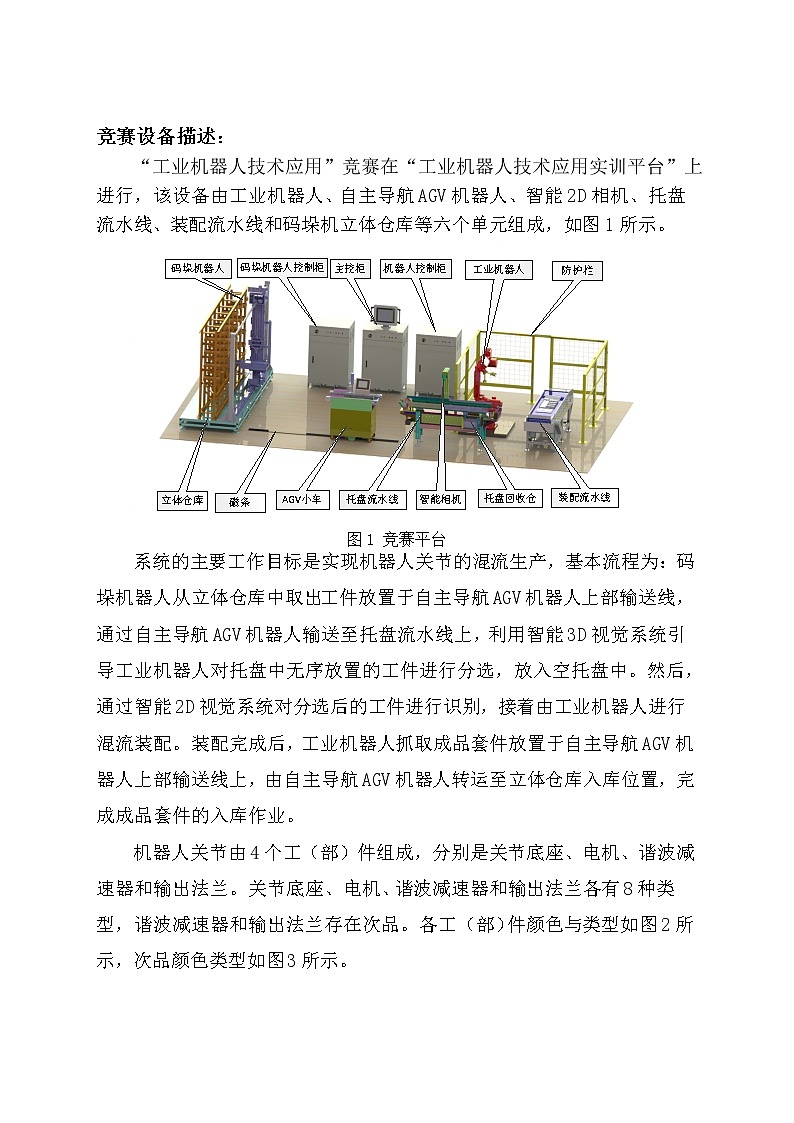
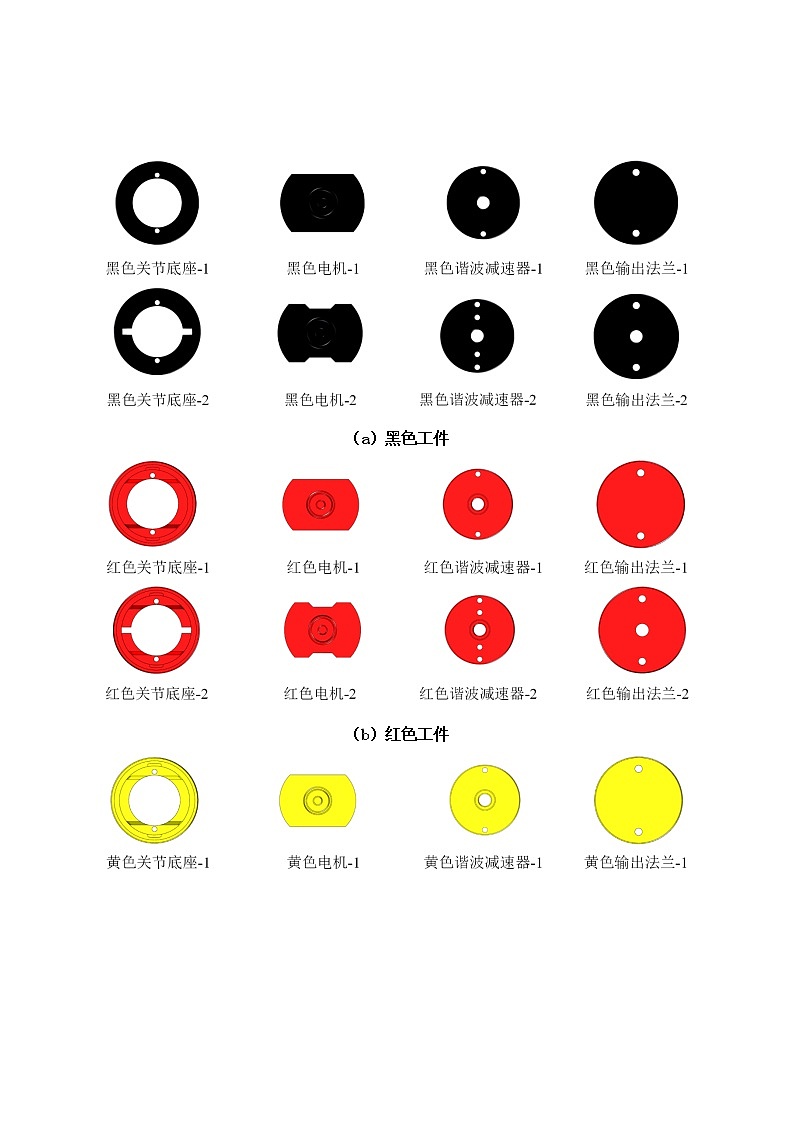
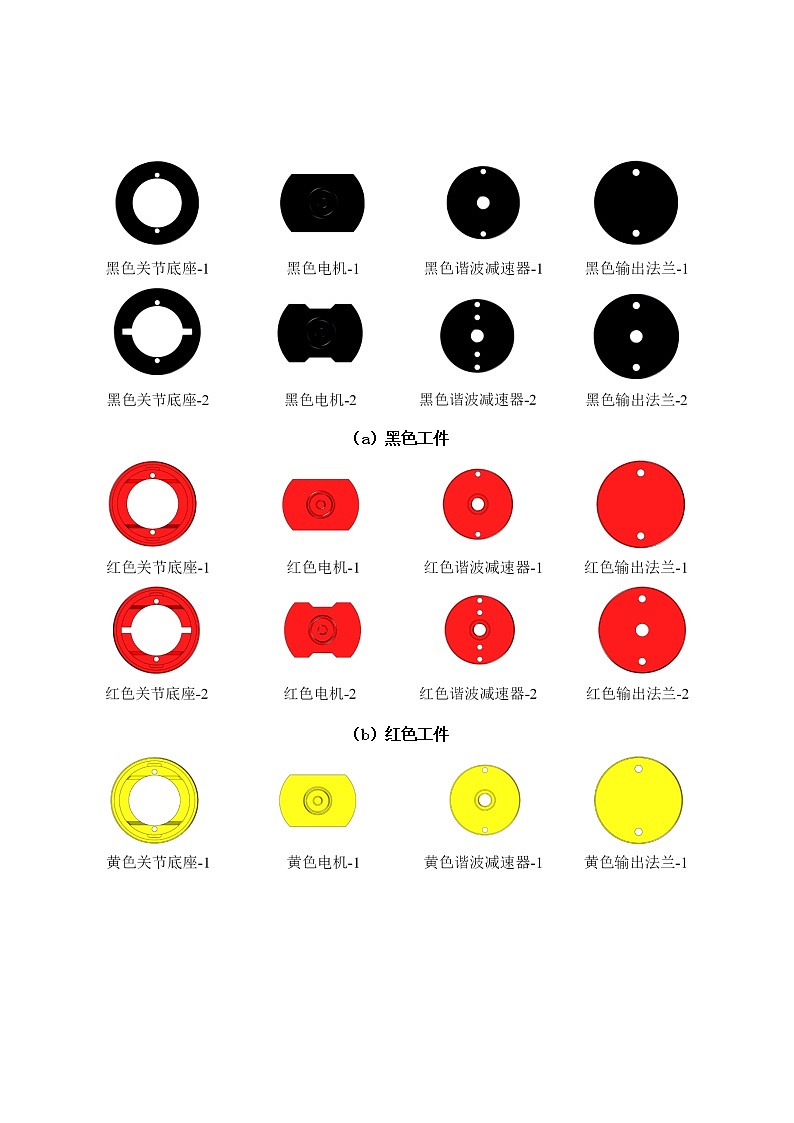
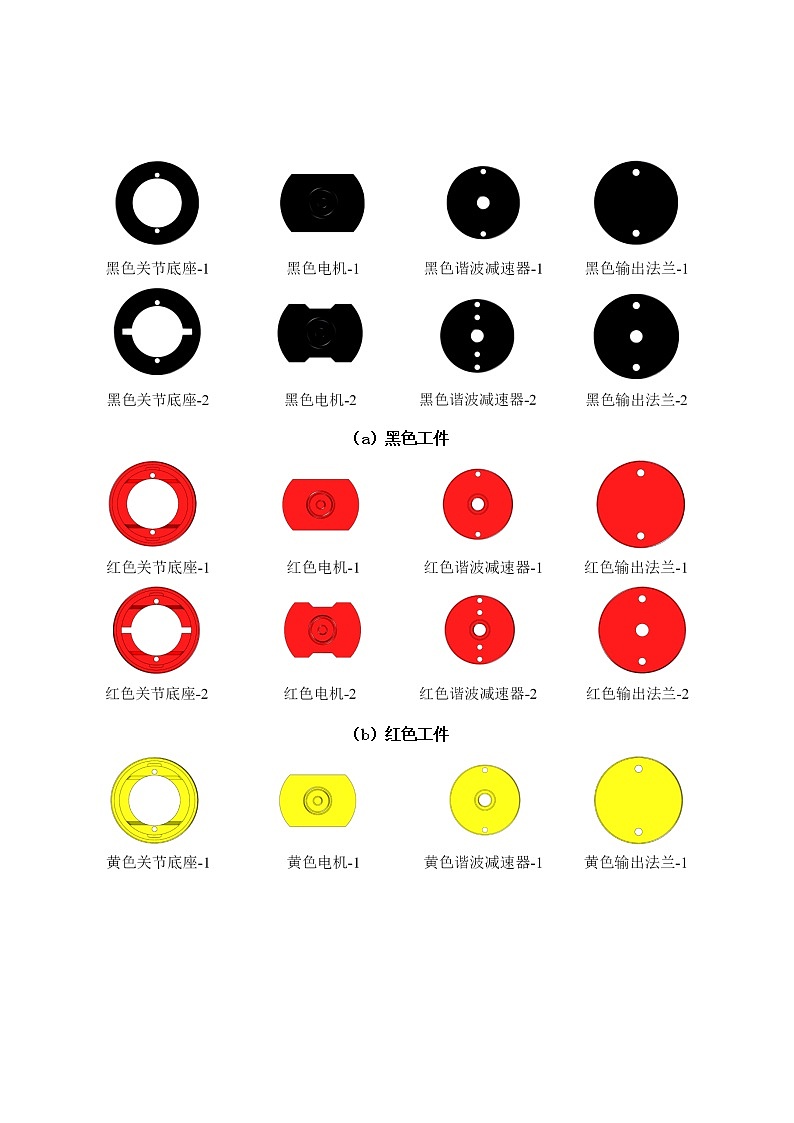
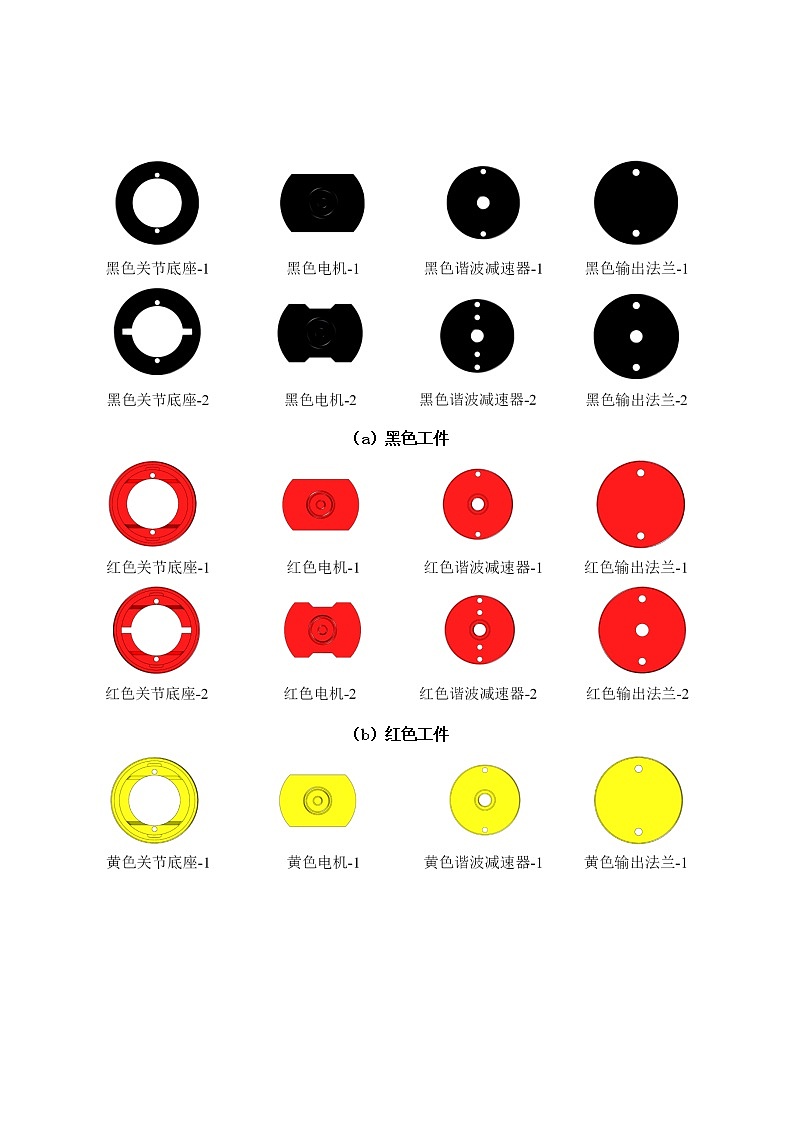
机器人关节由4个工(部)件组成,分别是关节底座、电机、谐波减速器和输出法兰。关节底座、电机、谐波减速器和输出法兰各有8种类型,谐波减速器和输出法兰存在次品。各工(部)件颜色与类型如图2所示,次品颜色类型如图3所示。
(a)黑色工件
(b)红色工件
(c)黄色工件
(d)蓝色工件
图2 合格工件
(a)黑色缺陷件
(b)红色缺陷件
(c)黄色缺陷件
(d)蓝色缺陷件
图3 缺陷工件
从图2所示的合格工件中选取2种类型的关节底座、2种类型的电机、2种类型的谐波减速器和2种类型的输出法兰,共8种类型的工件。各种类型工件的代号见表1。
表1 选取的合格工件序号及代号
合格件类型
关节底座
电机
谐波减速器
输出法兰
序号
红色关节底座-1
蓝色电机-2
红色谐波减速器-2
蓝色输出法兰-1
代号
A
B
C
D
序号
蓝色关节底座-2
红色电机-1
蓝色谐波减速器-1
蓝色输出法兰-2
代号
E
F
G
H
谐波减速器和输出法兰存在次品,在生产过程混入的2种缺陷件类型如表2所示。
表2 缺陷件类型类型
缺陷件类型
谐波减速器
输出法兰
类型序号
红色4A-2
蓝色3A-3
工件代号
N
P
托盘结构以及托盘放置工件的状态如图4所示,托盘两侧设计有档条,两档条的中间区域为工件放置区。
图4 待装配的工件放置于托盘中的状态
系统中托盘流水线和工件装配生产线工位分布如图5所示。
图5 托盘流水线和装配流水线工位分布
装配流水线如图6所示。由成品库G7、装配工位G8和备件库工位G9三个部分组成。定义成品库G7工位的工作位置为装配流水线回原点后往中间运动200mm的位置;装配工位G8的工作位置为在装配流水线中间位置;备件库G9工位的工作位置为装配流水线回原点后往中间运动200mm的位置。
图6 装配流水线
装配工位配置有四个定位工作位,按图6规定为1号位、2号位、3号位和4号位。每个定位工作位安装了伸缩气缸用于工件二次定位,当机器人将工件送至装配工位后,先通过气缸将其进行二次定位,然后再进行装配,以提高机器人的抓取精度,保证顺利完成装配。
备件库主要用于存放电机、谐波减速器和输出法兰等工件,也可以用于缺陷工件的临时存放。
成品库主要用于存放已装配完成的工件,也可以用于其他工件临时存放。
工件在装配工位、备品库、成品库不允许堆叠,每个工件摆放位只能摆放一个工件。
立体库中托盘的位置规定如图7所示。
图7 立体库托盘的位置规定
如表3所示是预设的工业机器人IP地址,系统中其余主要模块的IP地址,各参赛队可根据实际情况自行修改。
表3 预设的工业机器人IP地址
序号
名称
IP地址分配
备注
1
工业机器人
192.168.8.103
预设
2022年全国职业院校技能大赛
工业机器人技术应用赛项(高职组)
竞赛任务书(样题)
第一赛程
选手须知:
1. 任务书共 13 页,如出现任务书缺页、字迹不清等问题,请及时向裁判申请更换任务书。
2. 竞赛过程配有两台编程计算机,参考资料(机器人、PLC、变频器的产品手册,设备的IO变量表)以.pdf格式放置在“D:\第一赛程\参考资料”文件夹下。
3. 附有2份不完整的图纸和表格(控制和气路),选手应按任务书要求进行设计并补充图纸和表格的内容。
4. 参赛团队应在3小时内完成任务书规定内容;选手在竞赛过程中创建的程序文件必须存储到“D:\第一赛程\赛位号”文件夹下,未存储到指定位置的运行记录或程序文件均不予给分。
5. 选手提交的试卷不得出现学校、姓名等与身份有关的信息,否则成绩无效。
6. 由于错误接线、操作不当等原因引起机器人控制器及I/O组件、智能相机、PLC、变频器、AGV的损坏以及发生机械碰撞等情况,将依据扣分表进行处理。
7. 每一个任务的初始状态和具体测试要求根据评判要求在开赛时、任务评分前或任务评分时给定。
8. 工件在装配工位、备品库、成品库不允许堆叠,一个工件摆放位同时只能摆放一个工件。
9. 在完成任务过程中,请及时保存程序及数据。
场次: 工位号: 日期:
任务一:工业机器人虚拟工作站系统搭建
在提供的虚拟仿真软件中,对照“工业机器人技术应用实训平台”实物布局,搭建对应的虚拟工作站系统。
要求如下:
1、虚拟工作站系统由工业机器人、AGV机器人、托盘流水线、装配流水线、视觉系统和码垛机立体仓库等六个部分组成;
2、虚拟工作站系统各部分位置应与实物布局有一定对应关系。
完成任务一后,举手示意裁判进行评判!
任务二:主控系统电路设计及接线
(一)主控柜电路接线图设计
根据设备组成及主控控制流程,结合提供的硬件单元功能,正确绘制电气原理图和填写接线引脚配置表。
要求如下:
在指定的附图1-1上绘制主控柜内变频器、步进驱动器的电气控制原理图,以及托盘流水线上的光电传感器和电磁阀的电气控制原理图。并在附表1-1接线引脚配置表上标注各信号的作用,例如Q2.1用于控制机器人暂停,则描述为“某某单元+功能”,即Q2.1表示“机器人暂停”,不要求描述完全一致,意思正确即可。
(二)主控柜元件安装及电路接线
如图1-1所示是主控电路板安装及接线之前的状态,要求完成主控PLC、步进电机驱动器接线以及网线接头制作、连接,如图1-2是主控柜电路板安装后的状态。
要求如下:
1)完成主控PLC、步进电机驱动器的安装;
2)根据绘制电气接线图和接线引脚配置表,完成主控PLC各接线端口的连接;
3)根据绘制的步进电机驱动器电气接线图,完成步进电机驱动器的各接线端口的连接;
4)对于电控柜中缺失的电缆,要求选手利用现场提供的工具剥线、压线、标号,并连接正确的端口;
5)对于电控柜中缺失的网线,要求选手利用现场提供的工具剥线、压线,完成网线接头的制作,并正确地与主控柜中各元件连接。
图1-1 主控柜电路板初始状态 图1-2 主控柜电路板安装及接线后的状态
测试要求如下:
运行主控PLC内的加密测试程序,要求在程序运行之后,点击触摸屏上“报警触发”控制按钮,主控柜控制面板上报警指示灯点亮。
图1-3 主控柜控制面板上报警指示灯状态
完成任务二中(一)-(二)后,举手示意裁判进行评判!
任务三:工业机器人末端执行器的气路设计与连接
(一)工业机器人末端执行器气路设计
根据现场提供的气源、气动元件、末端执行器零部件,设计气路原理图。
要求如下:
在指定的附图1-2上绘制气路原理图,并用文字标注元件名称及作用。
(二)工业机器人末端执行器安装及气路连接
根据现场提供的气源、气动元件、末端执行器零部件,完成气路元件的安装、工业机器人末端真空吸盘、气动三爪卡盘的机械安装。根据设计的气路原理图,完成各个气动元件的气路连接。
要求如下:
1)吸盘与吸盘支架的安装,气管接头的安装;
2)三爪卡盘与支架的安装,气管接头的安装;
3)末端法兰与机械手本体固连(连接法兰圆端面与机械手本体J6关节输出轴末端法兰);
4)激光笔的安装;
5)机器人手爪夹具及激光笔控制电缆的连接。
6)根据绘制的气路原理图,完成三爪卡盘气路连接;
7)根据绘制的气路原理图,完成真空吸盘气路连接。
测试要求如下:
1)运行主控PLC内的加密测试程序,要求在程序运行之后,点击触摸屏上控制按钮,激光笔发出激光点。
2)操作机器人示教盒,控制三爪卡盘张开和闭合;
3)操作机器人示教盒,控制双吸盘吸取工件。
完成任务三中(一)--(二)后,举手示意裁判进行评判!
任务四:变频器参数设置及连接
(一)变频器接线及参数设置
根据任务二设计的变频器电气控制原理图,完成变频器的各接线端口的连接,在变频器操作面板上设置运行参数,实现通过PLC数字输出控制变频器的使能、正/反转启停、三段速调速。
要求如下:
1)完成变频器的各接线端口的连接;
2)设置控制变频器使能的参数;(按照表1-1中的数值设置对应参数)
3)设置变频器用于控制电机正反转启动的参数;(按照表1-1中的数值设置对应参数)
4)设置变频器控制三段速调速参数。(按照表1-1中的数值设置对应参数)
5)设定变频器用于控制过载保护,加、减速度的参数。(按照表1-1中的数值设置对应参数)
表1-1 变频器参数说明和数值
参数作用
参数数值
参数数值的含义
执行相应的宏文件
17
双向两线制控制
设置指令 “ON/OFF(OFF1)” 的信号源
r3333.0
由两线制信号启动变频器
设置设定值取反的信号源
r3333.1
由两线制信号反转
设置正转启动停止控制信号源
722.2
数字量输入DI2
设置反转启动停止控制信号源
722.3
数字量输入DI3
停车命令指令源2
722.1
数字量输入DI1定义为OFF2命令
端子DO0的信号源(端子19/20常开)
52.2
变频器运行使能
固定速度1
500
转速,单位是rpm
固定速度2
1000
转速,单位是rpm
设置选择固定转速1的信号源。
722.4
数字量输入DI4
设置选择固定转速2的信号源。
722.5
数字量输入DI5
设置主设定值的信号源
r1024
固定转速设定值有效
加速时间
5
单位是s
减速时间
5
单位是s
功率单元过载反应
2
降低输出电流或输出频率或脉冲频率
测试要求如下:
1)运行主控PLC内的加密测试程序,要求在程序运行之后,点击触摸屏上控制按钮,链轮带动链条转动,无异响、无异常振动。
完成任务四中(一)后,举手示意裁判进行评判!
任务五:智能2D视觉系统编程调试
(一)智能2D相机安装及网络系统的连接
根据现场提供的相机支架零部件,完成相机安装。然后,完成相机、编程计算机、主控单元、码垛机单元和触摸屏的连接。
要求如下:
1)安装相机支架及相机;
2)连接相机的电源线、通信线。
测试要求如下:
启动相机编程软件,实时显示相机视野内图像,调整相机支架至合适的位置。
(二)背光源控制设定
在主控PLC上编程,控制背光源关闭与打开,确保在背光源关闭和打开的两种状态下,智能相机均能够稳定、清晰地摄取图像信号。
测试要求如下:
1)在主控PLC的触摸屏上设计背光源测试按钮,点击按钮控制光源的关闭与打开;
2)在软件中能够正确实时查看到现场放置于相机下方托盘中工件的图像,要求工件图像清晰。实现后的界面效果如图1-4所示。
图1-4 背光源关闭和打开状态下图像界面显示效果示例
(三)智能相机的调试和编程
在视觉编程软件上进行设置和程序,完成图像的标定、样本学习任务。要求如下:
1)对图像进行标定,实现相机中出现的尺寸和实际的物理尺寸一致;
2)对托盘内的单一工件进行拍照,利用视觉工具,编写相机视觉程序对工件进行学习,获取该工件的外观颜色信息;
3)对托盘内的单一工件进行拍照,获取该工件的形状和位置、角度偏差,利用视觉工具,编写相机视觉程序对工件进行学习。规定相机镜头中心为位置零点,智能相机学习的工件角度为零度;
4)编写12种工件及缺陷件识别程序,规定每个工件地址空间的第1个信息为工件位置X坐标,第2个信息为工件位置Y坐标,第3个信息为角度偏差。
测试要求如下:
选手依次手动将摆放有1~12号工件以及缺陷工件的托盘(每一个托盘放置1个工件)放置于拍照区域,在Insight Explorer软件中能够得到和正确显示12种工件及2种缺陷件的位置、角度数据。
完成任务五中(一)--(三)后,举手示意裁判进行评判!
任务六:工业机器人系统编程调试
(一)工业机器人设定
1.工业机器人工具坐标系设定
1)设定手爪1双吸盘的工具坐标系;
2)设定手爪2三爪卡盘的工具坐标系,参考值为(0,-144.8,165.7,90,140,-90)。
2.托盘流水线和装配流水线位置调整
利用工业机器人手爪上的激光笔,通过工业机器人示教操作,使工业机器人分别沿X轴、Y轴运动,调整托盘流水线和装配流水线的空间位置,使托盘流水线和装配流水线与工业机器人相对位置正确。
(二)工业机器人示教编程
1.通过工业机器人示教器示教、编程和再现,能够实现依次将4种工件从托盘流水线工位G1的托盘中心位置,搬运到装配流水线G7、G8、G9指定的位置中。
测试要求如下:
1)将工件依次摆放于托盘中心位置,每次放一种工件,用末端工具对工件进行取放操作。如表1-2所示,工件取放在装配工位G8的对应定位工位中,工件放到位置后,控制气缸夹紧工件,进行二次定位。然后,用双吸盘将空托盘放置于托盘收集处。
表1-2工件摆放说明
工件代号
A
B
C
D
工件的摆放位置
G8-1
G8-4
G8-3
G8-2
2)将摆放完成的工件取放在如表1-3所示的成品库G7和备件库G9中。
表1-3工件摆放说明
工件代号
A
B
C
D
工件的摆放位置
G7-2
G9-1
G9-4
G9-5
(三)工业机器人系统虚拟调试
基于竞赛平台的系统、组成和布局,搭建软件在环数字孪生系统、创建数字孪生模型和设置模型驱动接口。基于竞赛平台的系统通信协议,在机电虚拟调试软件中配置通信和信号,将配置的信号和模型驱动接口建立一一映射。采用数据驱动模型的方式,机电虚拟调试软件中采集数字孪生系统的数据和信号驱动数字孪生模型,进行工业机器人竞赛平台的软件在环虚拟调试。
操作虚拟示教器进行示教、编程与虚拟调试,实现自动将装配流水线工位G7和G9的1~8号工件搬运到装配工位G8指定位置进行二次定位、工件装配、放入成品库和拆解,拆解后将工件摆放到装配流水线的指定位置。装配和拆解任务虚拟调试完成后,将机器人程序下载到竞赛平台中,并调试程序及目标点,完成工业机器人装配与拆解等任务。
测试要求如下:
1)基于竞赛平台的控制系统,构建软件在环数字孪生系统,数字孪生系统包括虚拟工业机器人系统和虚拟PLC系统。虚拟工业机器人系统和竞赛平台具有一致的编程环境和指令,且具有虚拟示教器功能;虚拟PLC系统具有同竞赛平台PLC一致的品牌和型号。
2)基于竞赛平台的组成和布局,机电虚拟调试软件中导入竞赛平台的三维模型并调整布局,布局和竞赛平台保持一致。机电虚拟调试软件中构建数字孪生模型,并设置模型驱动接口。
3)基于竞赛平台的系统通信协议,在机电虚拟调试软件中配置通信、协议及信号,采集数字孪生系统中工业机器人、PLC、传感器的数据和信号。采用数据驱动模型的方式,数字孪生系统能够驱动数字孪生模型。
4)基于搭建的数字孪生系统和数字孪生模型,操作虚拟示教器能够控制工业机器人数字孪生模型的运动。操作虚拟PLC系统能够控制装配流水线数字孪生模型的动作。
5)机电虚拟调试软件中按照表1-4放置装配流水线工位G7和工位G9的工件。
6)通过工业机器人系统虚拟调试,机器人自动将装配流水线G7和G9工位中的工件,按照装配次序依次抓取并放置于G8工位指定位置,每放置一个工件完成,夹紧气缸应立即动作,进行二次定位。定位完成后,机器人抓取工件,在G8的2号工位进行A→B→C→D组合的装配。装配完成后,机器人将装配的A→B→C→D组合放入成品库G7的4号工位。
7)通过工业机器人系统虚拟调试,机器人自动将装配流水线G7和G9工位中的工件,按照装配次序依次抓取并放置于G8工位指定位置,每放置一个工件完成,夹紧气缸应立即动作,进行二次定位。定位完成后,机器人抓取工件,在G8的3号工位进行E→F→G→H组合的装配。装配完成后,机器人将装配的E→F→G→H组合放入成品库G7的1号工位。
8)通过工业机器人系统虚拟调试,机器人对A→B→C→D组合 和 E→F→G→H组合工件依次进行自动拆解,拆解后放置结果如表1-5所示。
9)装配和拆解任务虚拟调试完成后,将机器人程序和PLC程序下载到竞赛平台中,并调试程序及目标点,完成上述4~6的工作任务,实现工业机器人装配和拆解作业。
表1-4 工件装配前人工摆放位置
工件代号
A
B
C
D
E
F
G
H
工件的摆放位置
G7-3
G9-1
G9-3
G9-6
G7-2
G9-2
G9-4
G9-5
表1-5 拆解后摆放位置
工件代号
A
B
C
D
E
F
G
H
工件的摆放位置
G7-2
G8-1
G9-4
G9-5
G7-3
G8-2
G8-4
G9-6
(四)工业机器人系统虚实同步
基于“(三)工业机器人系统虚拟调试”搭建的竞赛平台数字孪生模型及其模型驱动接口,结合竞赛平台开放的通信协议,机电虚拟调试软件中配置通信和信号,将配置的信号和模型驱动接口建立一一映射。采用数据驱动模型的方式,机电虚拟调试软件采集物理竞赛平台的数据和信号驱动数字孪生模型,实现数字孪生竞赛平台和物理竞赛平台的虚实同步。
测试要求如下:
1)基于物理竞赛平台中工业机器人和PLC的通信协议,在机电虚拟调试软件中配置相应的通信和信号,将配置的信号和模型驱动接口建立一一映射。
2)机电虚拟调试软件采集物理竞赛平台工业机器人的数据和信号,从而驱动工业机器人数字孪生模型,实现工业机器人数字孪生模型和物理工业机器人的运动同步。
3)操作工业机器人进行装配和拆解作业,根据工业机器人作业过程中的关键位置点(如工件抓取、放置位置等),调整数字孪生竞赛平台中相关对象的位置,实现数字孪生竞赛平台和物理竞赛平台的对象位置和布局“1:1”。
4)工业机器人自动执行装配和拆解作业,数字孪生竞赛平台和物理竞赛平台保持虚实同步。
完成任务六中(一)-(四)后,举手示意裁判进行评判!
注意:若选手未全部完成第一赛程的调试任务,则在第二赛程不能继续对第二赛程的任务进行评判。
2022年全国职业院校技能大赛
工业机器人技术应用赛项(高职组)
竞赛任务书(样题)
第二赛程
选手须知:
1. 任务书共 8 页,如出现任务书缺页、字迹不清等问题,请及时向裁判申请更换任务书。
2. 竞赛过程配有两台编程计算机,参考资料(机器人、PLC、变频器的产品手册,设备的IO变量表)以.pdf格式放置在“D:\第二赛程\参考资料”文件夹下。
3. 参赛团队应在3.5小时内完成任务书规定内容;选手在竞赛过程中创建的程序文件必须存储到“D:\第二赛程\赛位号”文件夹下,未存储到指定位置的运行记录或程序文件均不予给分。
4. 选手提交的试卷不得出现学校、姓名等与身份有关的信息,否则成绩无效。
5. 由于错误接线、操作不当等原因引起机器人控制器及I/O组件、智能相机、PLC、变频器、AGV的损坏以及发生机械碰撞等情况,将依据扣分表进行处理。
6. 每一个任务的初始状态和具体测试要求根据评判要求在开赛时、任务评分前或任务评分时给定。
7. 工件在装配工位、备品库、成品库不允许堆叠,一个工件摆放位同时只能摆放一个工件。
8. 在完成任务过程中,请及时保存程序及数据。
场次: 工位号: 日期:
任务一:检查赛程一的任务准确性
赛程二正式开始后,参赛选手需要通过目测、手动触摸等手段,完成如下操作:
1)检查主控柜电气元件的安装与接线,如有异常,请向裁判报告;
2)检查工业机器人本体各部件,重点检查末端执行器,如有异常,请向裁判报告;
3)检查托盘流水线各部件,如有异常,请向裁判报告;
4)检查装配流水线各部件,如有异常,请向裁判报告;
5)检查自主导航AGV机器人各部件,如有异常,请向裁判报告;
6)检查立体仓库和码垛机各部件,如有异常,请向裁判报告。
在检查过程中,要求:
1)选手不能操作机器人;
2)选手不能操作电脑;
3)选手不能点击触摸屏;
4)选手可以阅读赛程二的任务书。
检查过程共持续30分钟,在选手检查设备各单元并确认无误后,在确认表上签写赛位号以确认。(不能签写学校、姓名等真实信息)
任务二:总控单元功能调试
完成总控单元各模块(托盘流水线、装配流水线)的控制功能调试。
装配流水线的板链上已安装了装配工位、备件库和成品库底板,为防止装配流水线移动时可能导致的设备损坏,发生严重机械碰撞事故。
操作时应注意:
1.装配流水线移动时,不要超出运动边界(建议左右最大位移不超260mm);
2.寻原点操作时,请注意装配流水线的运动方向,并在可运动范围内完成寻原点操作。
(一)托盘流水线编程调试
设置变频器地址、功率、使能信号等参数。编写PLC控制程序和触摸屏控制界面,实现倍速链正转、反转、停止控制,及相应状态指示。编写PLC程序和触摸屏界面,实现托盘在流水线上的正常流转,调试界面参考示例如图2-1所示,不要求界面设计风格与示例界面一致,要求显示的信息与示例界面一致,要求控制按钮功能与示例界面一致。
测试要求如下:
1)手动点击触摸屏按钮,控制倍速链正反向运动、停止运动。
2)手动点击触摸屏按钮,控制各工位气档升降。
3)手动将托盘放置到托盘流水线入口处,入口光电开关检测到信号,倍速链启动正转;
4)当拍照工位光电开关检测到托盘,拍照工位气挡升起,延时3s拍照工位气挡下降;
5)当抓取工位光电开关检测到托盘,抓取工位气挡升起,延时3s后倍速链停止运行。
图2-1 触摸屏控制界面示意图
(二)装配流水线编程调试
设置驱动器参数,编写PLC及触摸屏程序,实现装配流水线手动正转、反转运动。调试界面参考示例如图2-2所示,不要求界面设计风格与示例界面一致,要求显示的信息与示例界面一致,要求控制按钮功能与示例界面一致。
测试要求如下:
1)通过触摸屏控制装配流水线,实现寻原点操作运行及状态显示;
2)通过触摸屏控制装配流水线,分别运行到G7、G8、G9工位,并显示相应运行数据。
图2-2 装配流水线运行界面
完成任务二中(一)--(二)后,举手示意裁判进行评判!
任务三:自主导航AGV机器人调试
(一)建立环境地图
利用自主导航AGV地图建模软件控制其在竞赛单元场地运动,结合其自带的智能传感器,构建环境地图。在环境地图中设置导航点,完成AGV自主导航与移动。
具体的任务要求:
(1)利用AGV地图建模软件,控制其在竞赛单元场地运动,构建环境地图。
(2)在环境地图中设置导航点,设置合理的“起始点”,在“立体仓库”附近设置合理的导航点;在“托盘流水线”的上料区一侧,设置合理的导航点;在“装配流水线”的工位附近,设置合理的导航点;以及中间过渡导航点。
(3)测试移动机器人的自主导航功能,控制移动机器人,使其自主地从立体仓库”附近导航点移动至“装配流水线”的工位附近导航点。
测试要求:
(1)要求选手在裁判评判时,展示环境地图的构建结果。
(2)要求选手在裁判评判时,按要求启动上述任务要求中第(3)点所述的自动化任务流程。
(二)工业机器人与自主导航AGV的协同作业
对由AGV、工业机器人进行对接联合调试,首先控制自主导航AGV从指定位置向“装配”导航点自主移动,然后工业机器人抓取成品套件,放置于自主导航AGV的上部输送带上,最后自主导航AGV运动至“立体仓库”导航点。
具体的任务要求:
(1)编写程序,完成如下自动化任务流程:
a)自主导航AGV自主地从起始点导航点移动至“装配”导航点;
b)工业机器人将成品套件放置于自主导航AGV的上部输送带上;
c)移动机器人自主移动至“立体仓库”导航点;
测试要求:
(1)要求选手在裁判评判时,启动上述任务要求中第(2)点所述的自动化任务流程。
完成任务三中(一)--(二)后,举手示意裁判进行评判!
任务四:立体仓库码垛机调试
(一)码垛机单轴功能调试
根据实际控制需要,设置码垛机X/Y/Z轴变频器相关参数(电机参数、使能、报警等)。编写码垛机立体仓库系统调试程序,能够实现手动控制码垛机各轴运动。码垛机立体仓库的调试界面参考示例如下图2-3 所示,不要求界面设计风格与示例界面一致,要求显示的信息与示例界面一致,要求控制按钮功能与示例界面一致。
图2-3 码垛机立体仓库的调试界面
测试要求如下:
1)正确设置变频器相关参数,使PLC能够正常控制各轴运动和显示状态信息;
2)正确手动控制码垛机X轴、Y轴和Z轴的正反向运动,到达各轴对应方向的限位时,自动停止运动。
(二)码垛机出库功能调试
编写码垛机立体仓库系统调试程序,能够实现码垛机立体仓库的基本运动和状态显示,如图2-4 所示,不要求界面设计风格与示例界面一致,要求显示的信息与示例界面一致,要求控制按钮功能与示例界面一致:包括码垛机的复位功能,码垛机停止功能,显示码垛机各个轴的运行状态、限位、定位和原点传感器状态,显示立体仓库中有无托盘信息。
图2-4 仓库界面示例
测试要求如下:
1)控制码垛机运动,观察界面上数据变化。
2)正确实现码垛机的复位和停止。
3)根据评判要求参赛选手手动放置2个托盘于立体仓库,在调试界面显示仓位信息,码垛机正确从立体库取托盘,并运动至出库位置。
完成任务四中(一)--(二)后,举手示意裁判进行评判!
注意:若选手未全部完成第二赛程的调试任务,则在第三赛程不能继续对第二赛程的任务进行评判。
2022年全国职业院校技能大赛
工业机器人技术应用赛项(高职组)
竞赛任务书(样题)
第三赛程
选手须知:
1. 任务书共 13 页,如出现任务书缺页、字迹不清等问题,请及时向裁判申请更换任务书。
2. 竞赛过程配有两台编程计算机,参考资料(机器人、PLC、变频器的产品手册,设备的IO变量表)以.pdf格式放置在“D:\第一赛程\参考资料”文件夹下。
3. 参赛团队应在3.5小时内完成任务书规定内容;选手在竞赛过程中创建的程序文件必须存储到“D:\第一赛程\赛位号”文件夹下,未存储到指定位置的运行记录或程序文件均不予给分。
4. 选手提交的试卷不得出现学校、姓名等与身份有关的信息,否则成绩无效。
5. 由于错误接线、操作不当等原因引起机器人控制器及I/O组件、智能相机、PLC、变频器、AGV的损坏以及发生机械碰撞等情况,将依据扣分表进行处理。
6. 每一个任务的初始状态和具体测试要求根据评判要求在开赛时、任务评分前或任务评分时给定。
7. 工件在装配工位、备品库、成品库不允许堆叠,一个工件摆放位同时只能摆放一个工件。
8. 在完成任务过程中,请及时保存程序及数据。
场次: 工位号: 日期:
任务一:检查赛程二任务准确性
赛程三正式开始后,参赛选手需要通过目测、手动触摸等手段,完成如下操作:
1)检查视觉系统程序,如有异常,请向裁判报告;
2)检查工业机器人程序,重点检查末端执行器,如有异常,请向裁判报告;
3)检查托盘流水线程序,如有异常,请向裁判报告;
4)检查装配流水线程序,如有异常,请向裁判报告。
在检查过程中,要求:
1)选手不能编写机器人程序;
2)选手不能在电脑上进行编程操作;
3)选手可以点击触摸屏,测试第二赛程已完成的任务;
4)选手可以查看赛程三的任务书。
检查过程共持续30分钟,在选手检查设备各单元并确认无误后,在确认表上签写赛位号以确认。(不能签写学校、姓名等真实信息)
任务二: 单元联机功能验证
(一)智能2D视觉系统与主控系统联调
编写视觉识别程序和主控PLC中视觉系统调试模块程序,使相机能够自动识别托盘中的工件,并将工件信息包括位置、角度和工件编号等显示在人机界面中。
编写视觉调试界面,参考示例如下图3-1所示,不要求界面设计风格与示例界面一致,要求显示的信息与示例界面一致,要求控制按钮功能与示例界面一致。
图3-1 视觉调试界面参考示例
测试要求如下:
1)选手人工放置装有工件的托盘于相机识别工位。
2)在主控PLC人机界面启动相机拍照后,在人机界面上正确显示识别工件信息包括位置、角度和工件编号。当放置缺陷工件时要求对应托盘TYPE一栏显示缺陷件序号,用来指示缺陷工件类型。
3)测试工件为C、H号工件以及P号缺陷件。3种工件人工随机放置于3个托盘内,1个托盘装有1个工件。
(二)智能2D视觉系统引导工业机器人抓取联调
编写主控PLC中工业机器人程序系统调试模块任务,能够自动实现对托盘流水线上托盘中的工件进行识别、分选、放置于指定位置,并且能够把空托盘放置于托盘库中,并且包含如下功能:
1)能够实现相机坐标系到机器人坐标系的转换,要求人机界面上显示在机器人坐标系中的抓取相对坐标值。
2)具有机器人启动、停止、暂停以及归位等功能。在工业机器人运行过程中,能够实现安全护栏操作门打开,工业机器人暂停运行的功能。
3)机器人任务状态号传输到主控PLC,并在人机界面显示,机器人状态分为机器人处于待机、运行、抓取错误等状态。
表3-1 机器人运行状态示例
序号
机器人状态号
机器人状态
1
100
待机
2
200
运行
3
300
抓取错误
测试要求如下:
1)点击按钮,启动工业机器人,观察界面上机器人位姿、坐标等数据变化状态。
2)启动托盘流水线,在工件作业流水线入口处参赛选手依次手动放入3个托盘,托盘中分别放置D、F号工件和N号缺陷件,工件位置随机放置。
3)在相机拍照工位对托盘上的工件进行识别,把识别结果传输给主控PLC。
4)主控PLC经过处理,传输视觉识别的数据给工业机器人,工业机器人根据PLC传输的数据,在工位G1抓取识别后托盘上的工件。
5)抓取合格工件后,放置于装配作业流水线的装配工位G8的任意位置,并控制气缸对合格工件进行二次定位。
6)抓取缺陷工件后,放置于装配作业流水线的备件库G9的配套位置。
7)托盘为空时,工业机器人把空托盘放入空托盘收集处。
(三)自主导航AGV机器人输送托盘功能调试
分别在主控PLC、立体仓库PLC、自主导航AGV上编写程序,实现托盘从立体仓库输送至托盘流水线的任务。
测试要求如下:
1)参赛选手手动放置3个托盘于立体仓库,在调试界面显示仓位信息,码垛机正确从立体库取托盘放置到自主导航AGV机器人上部输送线上;
2)自主导航AGV机器人记录放入的托盘数量,每放入一个托盘计数加1,依次放置托盘数量达到3个时,自主导航AGV机器人自动离开立体仓库端;
3)自主导航AGV机器人运动到托盘流水线端,自主导航AGV机器人上部输送带将托盘输送至托盘流水线上,每输送一个托盘计数减1;
4)输送完毕后,自主导航AGV机器人自动返回立体仓库端。
完成任务二中(一)--(三)后,举手示意裁判进行评判!
任务三:系统综合任务实现
(如果参赛队没有完成码垛机程序,可采用人工放置托盘到AGV小车上,但必须报告裁判,参赛队该项目中关于码垛机和AGV的相关任务均不得分)。
系统综合工作任务如下:
(一)HMI交互功能设计
1.在HMI主控界面设计黄、绿、红三种状态信号灯:绿色状态信号灯指示初始状态正常,红色状态信号灯指示初始状态不正常,黄色状态信号灯指示任务完成。能够在系统运行时,正确显示当前系统的工作状态。
2.能够在主控系统HMI触摸屏上,操控码垛机完成启动、停止、暂停和复位功能。
(二)MES交互功能设计
根据综合任务要求,由选手自行编写与MES对接的PLC程序,要求满足以下基本功能:
1.能够在MES系统仓库管理界面中选择指定库位,控制码垛机对选择位置的物料进行出库操作(库位工件信息按照);
2.能够在MES系统(如下图所示)设备管理->总控操作页面上实现系统的复位、启动、停止等功能:
1)系统复位为系统中工业机器人、托盘流水线、装配流水线以及码垛机立体仓库处于初始归零状态;
2)系统启动为系统自动按照综合任务运行;
3)系统停止为停止系统运动,包括系统中的工业机器人、托盘流水线、装配流水线以及码垛机立体仓库等模块。
系统的初始状态是指:
1)工业机器人、视觉系统、变频器、伺服驱动器、PLC处于联机状态;
2)工业机器人处于工作原点;
3)托盘流水线上没有托盘;
4)码垛机X轴、Y轴以及Z轴处于原点。
上述条件中任一条件不满足,则红色警示灯以1Hz的频率闪烁,黄色和绿色灯均熄灭,这时系统不能启动。如果网络正常且上述各工作站均处于初始状态,则绿色警示灯常亮。
3.能够在MES系统中完成工作参数的配置,不同成品BOM的编制,看板数据的对接及生产订单的下发等功能。
1)配置MES系统中设置相关工作参数,让MES系统能够与PLC、机器人等设备进行正常通讯;
2)根据任务书要求,在MES系统(如下图所示)工艺设计->EBOM中完成产品BOM表的编制,并配置配件相关信息;
3)在PLC侧,按照附件表,完成与MES通讯数据块的创建;
4)在MES系统中下发产品种类和对应数量等信息到主控PLC;
5)能够利用MES系统,启动整个产线的运行;
6)在系统运行过过程中,能够在MES系统中实时查看装配工位的工件状态信息和当前完成情况;
7)能够在MES数据看板中,查看工业机器人和码垛机的当前工作状态信息;
8)能够调出MES数据统计分析看板(设备利用率,产品完成统计等数据)
(三)系统综合任务实现
提供12个合格工件:可组装成1套I型成品、1套II型成品和III型成品,以及2个不成套的工件;(I型成品、II型成品和III型成品的组合类型,参见竞赛任务书(附件),但不得在请求任务评判前提供)
另外,提供2个缺陷工件。所有工件存放于立体仓库和备件库中,立体仓库中的每个托盘中放置一个工件。
任务要求:
1.工业机器人在装配工位G8指定位置进行装配;
2.工业机器人装配过程中抓取的工件为缺陷工件时,红色指示灯亮,摆放完毕后红色指示灯灭;
3. 订单系统根据I型成品、II型成品和III型成品套件的设置,规划装配工艺;
4.所有待装配工件必须经气缸二次定位后,才可进行装配;
5.工业机器人摆放工件时,必须将该工位移动至装配流水线规定的工作工位位置(见竞赛设备描述中装配流水线的规定);
6.所有生产任务完成后,装配工位G8不能有工件、缺陷件以及成品,并且绿色指示灯1Hz闪烁;
7.入库时,需将所有的成品,放到立体仓库指定的区域;
8.入库时,工业机器人从托盘收集处每次取出一个托盘,将所有待入库物品依次放到流水线托盘,每个托盘只放一个物品;空托盘可以放置在托盘收集处,也可以通过返库流程运送到立体仓库的待作业工件区;
9.入库完成后,设备处于初始状态,并且绿色指示灯0.5Hz闪烁;
10.在入库过程中,托盘在从倍速链流向小车的过程中,可以人工辅助工件顺利运送到小车上,其它情况下不允许人工干预系统的正常运行;
11.安全门打开时设备停止工作,安全门关上后,进行复位后重新运行设备,安全门打开时红色指示灯亮,关闭是红色指示灯灭。
编程实现任务流程:
1.在电脑上的word文档中绘制综合任务编程的流程图,如图3-3所示是流程图示意图,要求在流程图中体现MES系统操作、视觉识别、PLC编程、工业机器人编程中关键步骤的功能、交互逻辑等信息。
图3-3 参考示意流程图
2.根据现场提供的编程环境操作和使用MES系统、编写PLC与MES对接程序、编写人机界面、主控、码垛机以及机器人等程序;完成工件的出库、识别、空托盘的回收、不同工件的分类、缺陷检测、搬运、装配以及入库等任务。具体任务流程如下:
(1)MES系统操作
在MES系统中按照上述要求编写生产产品的BOM表,配置相关工作参数并初始化系统,然后启动MES进行生产任务;
(2)出库和生产流程
1)从立体库中按照“从第1列到第7列,每1列从第1行到第4行顺序”取出装有工件的托盘,码垛机依次放入AGV机器人,AGV机器人初始位置在立体仓库端;
2)AGV自动运行至托盘流水线位置进行对接,自动对接完成后AGV上的托盘将被输送至工件作业流水线上。托盘输送完毕,AGV自动返至立体仓库端,继续放托盘,如此循环直至所有托盘输送完毕;
3)在工件作业流水线上,利用相机对工件进行识别,在抓取工位,机器人根据相机识别结果进行抓取,并根据任务要求放置相应位置,工件放置完后,抓取并放置空托盘于托盘库中;
4)按照任务要求对整个机器人关节进行装配,装配完成后将成品摆放至成品库指定位置;
5)完成所有成套机器人关节装配、不成套配件和缺陷工件摆放任务后,生产流程结束。
(3)入库流程
1)入库时,自主导航AGV根据主控系统的信号,移动至“装配工位”导航点;
2)工业机器人将成品套件放置于自主导航AGV的上部输送带上;
3)移动机器人自主移动至“立体仓库”导航点;
4)码垛机对该托盘进行入库操作,并放到立体仓库指定区域;
5)循环完成所有物品的入库操作。
测试要求如下:
1)在选手请求任务评判时,裁判向其提供竞赛任务书(附件)(不得在请求任务评判前提供);
2)选手参照竞赛任务书(附件),在立体仓库和备件库中摆放工件;
3)成品装配位置参照竞赛任务书(附件);
4)正确操作MES系统启动生产任务。
5)按照出库和装配流程自动完成1套I型成品、1套II型成品和1套III型成品的装配。
6)按照入库流程完成G7区域所有的成品入库;
7)入库顺序和摆放区域参照竞赛任务书(附件);
8) 参照竞赛任务书(附件),在自动运行流程启动之前,选手在MES系统相关界面设置成品套件组合类型、备件放置位、成品装配位、成品返库的顺序和摆放仓位。
(四)系统虚实协同
基于竞赛平台的组成和布局,创建竞赛平台的数字孪生模型,包括立体仓库、码垛机、AGV、工业机器人、托盘流水线和装配流水线,并设置上述模型驱动接口。基于竞赛平台的系统通信协议,机电虚拟调试软件中配置对应的通信和信号,将配置的信号和模型驱动接口建立一一映射的关系,机电虚拟调试软件中采集物理竞赛平台的数据和信号。采用数据驱动模型的方式,物理竞赛平台的数据和信号驱动数字孪生竞赛平台的虚拟对象,实现数字孪生竞赛平台和物理竞赛平台的虚实协同。
测试要求如下:
1)基于竞赛平台的组成和布局,机电虚拟调试软件中导入竞赛平台的所有对象三维模型(包括立体仓库、码垛机、AGV、工业机器人、托盘流水线和装配流水线),并按照实际竞赛平台进行布局。
2)根据竞赛平台实际的运动关系,机电虚拟调试软件中设置刚体、碰撞体、运动副、位置控制、传感器等,创建竞赛平台的数字孪生模型。
3)根据竞赛平台各对象的控制方式,机电虚拟调试软件中配置数字孪生模型的驱动接口。
4)根据竞赛平台的系统通信方式,在机电虚拟调试软件中配置对应的通信;根据通信方式对应的通信协议,配置对应的信号,将配置好的信号和模型驱动接口建立一一映射的关系。
5)操作立体仓库和码垛机进行工件出库和入库,根据工件出入库的关键位置点,调整数字孪生竞赛平台的立体仓库仓位,实现物理立体仓库和数字孪生立体仓库的虚实协同。
6)操作AGV从起始点运动到终点,调整数字孪生AGV的位置,实现物理AGV和数字孪生AGV的虚实协同。
7)操作工业机器人进行装配和拆解作业,根据工业机器人作业过程中的关键位置点(如工件抓取、放置位置等),调整数字孪生竞赛平台中相关对象的位置,实现物理工业机器人和数字孪生工业机器人的虚实协同。
8)工业机器人竞赛平台自动运行,执行工件出库、AGV输送至托盘流水线、工件检测、工业机器人装配、工业机器人拆解、AGV输送至立体仓库、工件入库等全流程。同步运行机电虚拟调试软件,实现数字孪生竞赛平台和物理竞赛平台的虚实协同。
完成任务三中(一)--(四)后,举手示意裁判进行评判!
2022年全国职业院校技能大赛高职组 嵌入式技术应用开发赛项模拟赛题(Word版): 这是一份2022年全国职业院校技能大赛高职组 嵌入式技术应用开发赛项模拟赛题(Word版),文件包含10-第二模块比赛任务流程表doc、08-第三模块比赛任务流程表docx、07-第二模块比赛任务流程表doc、07-第三模块比赛任务流程表docx、06-第二模块-比赛任务流程表doc、06-第三模块比赛任务流程表docx、01-第三模块比赛任务流程表docx、05-第二模块比赛任务流程表doc、05-第三模块比赛任务流程表docx、09-第三模块比赛任务流程表docx、04-第二模块比赛任务流程表doc、04-第三模块比赛任务流程表docx、09-第二模块比赛任务流程表doc、03-第二模块比赛任务流程表doc、03-第三模块比赛任务流程表docx、02-第二模块比赛任务流程表doc、02-第三模块比赛任务流程表docx、10-第三模块比赛任务流程表docx、01-第二模块比赛任务流程表doc、08-第二模块比赛任务流程表doc、10-第一模块比赛任务表docx、09-第一模块比赛任务表docx、01-第一模块比赛任务表docx、08-第一模块比赛任务表docx、07-第一模块比赛任务表docx、05-第一模块比赛任务表docx、04-第一模块比赛任务表docx、03-第一模块比赛任务表docx、02-第一模块比赛任务表docx、06-第一模块比赛任务表docx等30份试卷配套教学资源,其中试卷共80页, 欢迎下载使用。
2022年全国职业院校技能大赛高职组 建筑装饰技术应用赛项模拟赛题(PDF版): 这是一份2022年全国职业院校技能大赛高职组 建筑装饰技术应用赛项模拟赛题(PDF版),文件包含模块四建筑装饰工程项目管理与实务题库pdf、05模块一模块二任务书pdf、10模块一模块二任务书pdf、09模块一模块二任务书pdf、01模块一模块二任务书pdf、04模块一模块二任务书pdf、06模块一模块二任务书pdf、07模块一模块二任务书pdf、08模块一模块二任务书pdf、02模块一模块二任务书pdf、03模块一模块二任务书pdf等11份试卷配套教学资源,其中试卷共247页, 欢迎下载使用。
2022年全国职业院校技能大赛高职组 机器人系统集成赛项模拟赛题(Word版): 这是一份2022年全国职业院校技能大赛高职组 机器人系统集成赛项模拟赛题(Word版),共53页。试卷主要包含了生产工艺流程,改造方案设计及安装接线,控制系统组态设置,PLC,工业机器人及智能视觉操作与编程,数控系统编程与调试,MES集成开发与云数据处理,虚拟仿真等内容,欢迎下载使用。











