

还剩19页未读,
继续阅读
所属成套资源:川教版信息技术九年级下册PPT课件+素材全套
成套系列资料,整套一键下载
川教版(2019)九年级下册第3节 安防机器人的制作实践优秀ppt课件
展开
这是一份川教版(2019)九年级下册第3节 安防机器人的制作实践优秀ppt课件,共27页。PPT课件主要包含了课堂导入,程序设计,课堂小结等内容,欢迎下载使用。
同学们:上一节课我们完成了机器人小车的搭建和功能调试,今天这节课我们要为机器人小车设计程序并编译程序、调校参数。
1. 能根据机器人小车的功能需求,设计流程图。
2. 能根据流程图编写程序,实现机器人小车的各项功能。
二、编译上传、调校参数
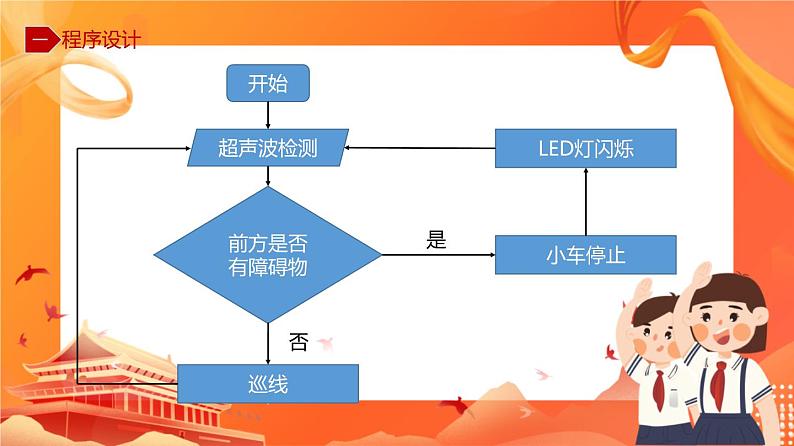
(1)机器人小车工作流程图为你厘清编程思路,可以采用先总后分的编程模式,先思考总体方案,再分子项目解决方案。下图是城市安防机器人小车“定线不定向”巡逻工作流程图:
小提示:由于Arduin控制器执行的特殊性,只要Arduin 开始运行,程序会一直循环执行。因此,会出现没有结束环节的无限循环流程图。
(2)循迹流程图机器人小车在沿直线或弧线运动过程中,可能会偏离黑线。因此,需要设计机器人小车循迹工作流程图。
思考:机器人小车在运动时,可能会因速度过快、偏转的角度过大,而偏离黑线,导致三个红外循迹传感器都未能检测到黑线。在这两种情况下,小车该如何判断是向右还是向左偏离了黑线?
机器人小车在运动过程中,可能需要处理多个结果,编程时通常会用变量来标识可能出现的结果,就是给初始状态下的机器人小车赋一个值(初始值),当机器人小车运动状态发生变化时,变量的值也随之发生改变,以此来判断和描述机器人小车运动状态发生变化后的结果。
探索实践:先声明一个标志变量,并赋予其一定的初始值,用于标志小车“脱线”偏转状态。当小车发生偏转时,标志变量在初始值基础上增加或减少一定值,从而完成小车“脱线”前偏转状态的“记录”,据此,完善流程图。
2.根据流程图编写程序
(1)设计并声明相关变量程序的编写会用到变量,需要在用之前进行声明,如下图所示:
(2)直流电机运行模块函数拖动“执行模块”中的电机控制模块,通过选择左右电机控制管脚号及运转速度,编写小车不同运行模式(直行、右转、左转、快速右转、快速左转、停止)的子程序,如下图所示:
课堂练习:请照上图的程序示例,完成机器人小车左转、快速左转、后退等行驶状态的子模块函数的编写。
(3)遇障碍提示程序当超声波传感器检测到障碍物与小车的距离小于等于30cm时,小车停止,LED灯开始间隔0.5s闪烁,其程序示例如下图所示:
(4)逻辑判断对照各工作流程图,编写判断程序。直行:当只有中间红外循迹传感器检测到黑线时,小车直行,其程序示例如下图:
右转:当小车向左偏离时,右侧红外循迹传感器会检测到黑线,小车需要右转。但为了预防小车向左偏离过快而三组红外循迹传感器均为检测到黑线的情况发生,这时,设定“脱线变量”递增。同理,若小车向右脱离黑线,“脱线变量”递减,其程序示例如下图:
快速右转:当小车向左脱线,需要小车快速右转回到黑线上时。其程序示例如下图:
“ + ”形路口或“ T ”形路口的判断当三个红外循迹传感器均检测到黑线时,可能是遇到了“T”形路口,也可能是遇到了“+”形路口,需要小车再向前直行0.1s,然后再次其判断,其程序示例如下图:
当只有中间红外循迹传感器检测到黑线时,则判断为“+”形路口。此时,小车后退0.1s,并生成3个随机数,以确定小车的运动方向,其程序示例如下图:
当三个红外循迹传感器都没有检测到黑线时,则判断为“T”形路口。此时,小车后退0.1s,并生成2个随机数,以确定小车是向左还是向右转,其程序示例如下图:
(5)组合各功能程序模块按以上逻辑,将各功能程序模块组合成完整的程序。
实践与探索:根据自己的设计,请你将各功能子程序模块进行整合,实现机器人小车“定线不定向”巡逻的功能。
1.检查各条命令是否完整,函数、变量等命名是否符合要求,通过“编译”检查是否成功。
2.通过USB数据线将Arduin控制器连接电脑,选择对应的板卡和串口端口上传控制程序。
3.通过校准红外循迹传感器检测距离和左右电机速度参数,完成机器人小车的调校。
4. 记录机器人小车的运动情况,完成程序中各参数的调整,以实现城市安防机器人小车“定线不定向”巡逻的主要功能。
小提示:在通电之前,请再次检查小车结构是否完好,各运动部件之间是否存在相互干涉的情况。
思考:如果需要机器人小车实现搬运物体的功能,还需要用到哪些器材?
拓展阅读:《自动驾驶》——教材35-36页。
安防机器人的制作实践(二)
1.确立搭建要求2.搭建机器人小车3.系统接线:接入传感系统、电机驱动及电机的接线
1.红外循迹传感器工作调试2.超声波传感器工作调试3.电机工作调试
1.绘制流程图:机器人小车工作流程图、循迹流程图、不同类型路口检测编程流程图2.根据流程图编写程序:设计并声明相关变量、直流电机运行模块参数、遇障碍提示程序、逻辑判断、组合各功能程序模块
1.通过“编译”检查2.将检查通过的程序上传到控制器3.校准传感器检测距离和电机速度4.调整程序参数
同学们:上一节课我们完成了机器人小车的搭建和功能调试,今天这节课我们要为机器人小车设计程序并编译程序、调校参数。
1. 能根据机器人小车的功能需求,设计流程图。
2. 能根据流程图编写程序,实现机器人小车的各项功能。
二、编译上传、调校参数
(1)机器人小车工作流程图为你厘清编程思路,可以采用先总后分的编程模式,先思考总体方案,再分子项目解决方案。下图是城市安防机器人小车“定线不定向”巡逻工作流程图:
小提示:由于Arduin控制器执行的特殊性,只要Arduin 开始运行,程序会一直循环执行。因此,会出现没有结束环节的无限循环流程图。
(2)循迹流程图机器人小车在沿直线或弧线运动过程中,可能会偏离黑线。因此,需要设计机器人小车循迹工作流程图。
思考:机器人小车在运动时,可能会因速度过快、偏转的角度过大,而偏离黑线,导致三个红外循迹传感器都未能检测到黑线。在这两种情况下,小车该如何判断是向右还是向左偏离了黑线?
机器人小车在运动过程中,可能需要处理多个结果,编程时通常会用变量来标识可能出现的结果,就是给初始状态下的机器人小车赋一个值(初始值),当机器人小车运动状态发生变化时,变量的值也随之发生改变,以此来判断和描述机器人小车运动状态发生变化后的结果。
探索实践:先声明一个标志变量,并赋予其一定的初始值,用于标志小车“脱线”偏转状态。当小车发生偏转时,标志变量在初始值基础上增加或减少一定值,从而完成小车“脱线”前偏转状态的“记录”,据此,完善流程图。
2.根据流程图编写程序
(1)设计并声明相关变量程序的编写会用到变量,需要在用之前进行声明,如下图所示:
(2)直流电机运行模块函数拖动“执行模块”中的电机控制模块,通过选择左右电机控制管脚号及运转速度,编写小车不同运行模式(直行、右转、左转、快速右转、快速左转、停止)的子程序,如下图所示:
课堂练习:请照上图的程序示例,完成机器人小车左转、快速左转、后退等行驶状态的子模块函数的编写。
(3)遇障碍提示程序当超声波传感器检测到障碍物与小车的距离小于等于30cm时,小车停止,LED灯开始间隔0.5s闪烁,其程序示例如下图所示:
(4)逻辑判断对照各工作流程图,编写判断程序。直行:当只有中间红外循迹传感器检测到黑线时,小车直行,其程序示例如下图:
右转:当小车向左偏离时,右侧红外循迹传感器会检测到黑线,小车需要右转。但为了预防小车向左偏离过快而三组红外循迹传感器均为检测到黑线的情况发生,这时,设定“脱线变量”递增。同理,若小车向右脱离黑线,“脱线变量”递减,其程序示例如下图:
快速右转:当小车向左脱线,需要小车快速右转回到黑线上时。其程序示例如下图:
“ + ”形路口或“ T ”形路口的判断当三个红外循迹传感器均检测到黑线时,可能是遇到了“T”形路口,也可能是遇到了“+”形路口,需要小车再向前直行0.1s,然后再次其判断,其程序示例如下图:
当只有中间红外循迹传感器检测到黑线时,则判断为“+”形路口。此时,小车后退0.1s,并生成3个随机数,以确定小车的运动方向,其程序示例如下图:
当三个红外循迹传感器都没有检测到黑线时,则判断为“T”形路口。此时,小车后退0.1s,并生成2个随机数,以确定小车是向左还是向右转,其程序示例如下图:
(5)组合各功能程序模块按以上逻辑,将各功能程序模块组合成完整的程序。
实践与探索:根据自己的设计,请你将各功能子程序模块进行整合,实现机器人小车“定线不定向”巡逻的功能。
1.检查各条命令是否完整,函数、变量等命名是否符合要求,通过“编译”检查是否成功。
2.通过USB数据线将Arduin控制器连接电脑,选择对应的板卡和串口端口上传控制程序。
3.通过校准红外循迹传感器检测距离和左右电机速度参数,完成机器人小车的调校。
4. 记录机器人小车的运动情况,完成程序中各参数的调整,以实现城市安防机器人小车“定线不定向”巡逻的主要功能。
小提示:在通电之前,请再次检查小车结构是否完好,各运动部件之间是否存在相互干涉的情况。
思考:如果需要机器人小车实现搬运物体的功能,还需要用到哪些器材?
拓展阅读:《自动驾驶》——教材35-36页。
安防机器人的制作实践(二)
1.确立搭建要求2.搭建机器人小车3.系统接线:接入传感系统、电机驱动及电机的接线
1.红外循迹传感器工作调试2.超声波传感器工作调试3.电机工作调试
1.绘制流程图:机器人小车工作流程图、循迹流程图、不同类型路口检测编程流程图2.根据流程图编写程序:设计并声明相关变量、直流电机运行模块参数、遇障碍提示程序、逻辑判断、组合各功能程序模块
1.通过“编译”检查2.将检查通过的程序上传到控制器3.校准传感器检测距离和电机速度4.调整程序参数
相关课件
初中信息技术川教版(2019)九年级下册第3节 安防机器人的制作实践课堂教学课件ppt: 这是一份初中信息技术川教版(2019)九年级下册第3节 安防机器人的制作实践课堂教学课件ppt,共35页。PPT课件主要包含了任务二等内容,欢迎下载使用。
川教版(2019)九年级下册第2节 实践操作 实施机器人项目完美版ppt课件: 这是一份川教版(2019)九年级下册第2节 实践操作 实施机器人项目完美版ppt课件,共19页。PPT课件主要包含了课堂导入,课堂小结等内容,欢迎下载使用。
川教版(2019)九年级下册第3节 跌倒救助机器人评优课课件ppt: 这是一份川教版(2019)九年级下册第3节 跌倒救助机器人评优课课件ppt,共20页。PPT课件主要包含了课堂导入,功能拓展与实践,课堂小结等内容,欢迎下载使用。












