
资料中包含下列文件,点击文件名可预览资料内容



还剩9页未读,
继续阅读
所属成套资源:湘科版科学四上同步PPT课件+教案+练习
成套系列资料,整套一键下载
小学科学湘科版 (2017)四年级上册2 改进小车精品教学课件ppt
展开
这是一份小学科学湘科版 (2017)四年级上册2 改进小车精品教学课件ppt,文件包含62《改进小车》课件pptx、62《改进小车》教学设计doc、62《改进小车》练习及答案docx、62制作带风帆的小车mp4等4份课件配套教学资源,其中PPT共17页, 欢迎下载使用。
上节课我们一起设计制作了小车,并进行了初步尝试。同学们回家又进行了完善,但是可能还有的小车跑不直,有的跑不远。这是什么原因呢?这节课,我们一起继续研究、改进小车。
你在制作过程中遇到了什么问题,怎么解决的?
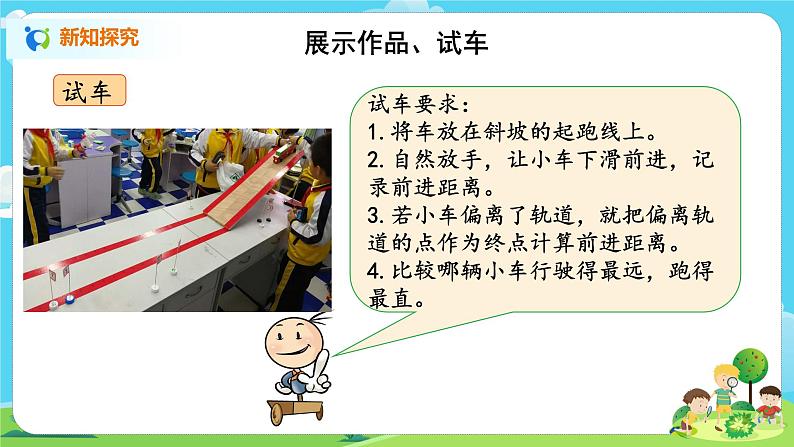
试车要求:1.将车放在斜坡的起跑线上。2.自然放手,让小车下滑前进,记录前进距离。3.若小车偏离了轨道,就把偏离轨道的点作为终点计算前进距离。4.比较哪辆小车行驶得最远,跑得最直。
小车有什么问题。找一找原因,提出修改方法。
我的车为什么总跑歪(wāi)了?检查车轴歪了吗?
是不是车重一些,跑得就远一些?
看来我的车轮子还不够灵活!
改变轮轴的光滑度和左右距离、小车的重量等方法可以改变小车的运动状态,影响小车的运动效果。
根据改进方案,改进小车,自行测试,反复改进,直至达到最佳效果。
评一评,哪辆小车跑得远?哪些经验值得我们学习?
观察其他组的小车,对比自己的小车,有哪些优缺点?哪些经验值得我们学习?
看!他们组的车与我们的都不同,是轮转轴不转!
他们组的车轮更宽,这样可以……
我们组的车轴非常光滑,这样……
1.改进小车的步骤:初步调试→改进方案→调试提高2.影响小车的运动因素:轮轴的光滑度和左右距离、小车的重量等。
无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的目的。 无人驾驶汽车是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车。它是利用车载传感器来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶。集自动控制、体系结构、人工智能、视觉计算等众多技术于一体,是计算机科学、模式识别和智能控制技术高度发展的产物,也是衡量一个国家科研实力和工业水平的一个重要标志,在国防和国民经济领域具有广阔的应用前景。
一、填空题影响小车的运动状态的因素有轮轴的( )、轮轴的( )和小车的( )等。二、判断题1.不同小组制作出来的小车优缺点也不一样。( )2.只有发现问题并找到出现问题的根源,才能有效地改进小车。( )3.如果小车跑歪了,可能是把车轴歪了,还有可能是左右轮子大小不一样。( )4.车子越重,就一定跑得越远。( )
配套教材导学案第6单元第2课《改进小车》的所有练习。
上节课我们一起设计制作了小车,并进行了初步尝试。同学们回家又进行了完善,但是可能还有的小车跑不直,有的跑不远。这是什么原因呢?这节课,我们一起继续研究、改进小车。
你在制作过程中遇到了什么问题,怎么解决的?
试车要求:1.将车放在斜坡的起跑线上。2.自然放手,让小车下滑前进,记录前进距离。3.若小车偏离了轨道,就把偏离轨道的点作为终点计算前进距离。4.比较哪辆小车行驶得最远,跑得最直。
小车有什么问题。找一找原因,提出修改方法。
我的车为什么总跑歪(wāi)了?检查车轴歪了吗?
是不是车重一些,跑得就远一些?
看来我的车轮子还不够灵活!
改变轮轴的光滑度和左右距离、小车的重量等方法可以改变小车的运动状态,影响小车的运动效果。
根据改进方案,改进小车,自行测试,反复改进,直至达到最佳效果。
评一评,哪辆小车跑得远?哪些经验值得我们学习?
观察其他组的小车,对比自己的小车,有哪些优缺点?哪些经验值得我们学习?
看!他们组的车与我们的都不同,是轮转轴不转!
他们组的车轮更宽,这样可以……
我们组的车轴非常光滑,这样……
1.改进小车的步骤:初步调试→改进方案→调试提高2.影响小车的运动因素:轮轴的光滑度和左右距离、小车的重量等。
无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的目的。 无人驾驶汽车是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车。它是利用车载传感器来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶。集自动控制、体系结构、人工智能、视觉计算等众多技术于一体,是计算机科学、模式识别和智能控制技术高度发展的产物,也是衡量一个国家科研实力和工业水平的一个重要标志,在国防和国民经济领域具有广阔的应用前景。
一、填空题影响小车的运动状态的因素有轮轴的( )、轮轴的( )和小车的( )等。二、判断题1.不同小组制作出来的小车优缺点也不一样。( )2.只有发现问题并找到出现问题的根源,才能有效地改进小车。( )3.如果小车跑歪了,可能是把车轴歪了,还有可能是左右轮子大小不一样。( )4.车子越重,就一定跑得越远。( )
配套教材导学案第6单元第2课《改进小车》的所有练习。
相关课件
小学科学第六单元 我们的小车2 改进小车评优课课件ppt: 这是一份小学科学<a href="/kx/tb_c4005450_t3/?tag_id=26" target="_blank">第六单元 我们的小车2 改进小车评优课课件ppt</a>,共29页。PPT课件主要包含了新课导入,新课教学,汇报设计思路,展示设计图,介绍组装流程,测试小车,测试小车并改进,看谁的小车跑得最远,典型习题,课堂小结等内容,欢迎下载使用。
小学科学湘科版 (2017)四年级上册2 改进小车精品ppt课件: 这是一份小学科学湘科版 (2017)四年级上册2 改进小车精品ppt课件,文件包含湘科版科学四年级上册62改进小车教学课件pptx、湘科版科学四上62改进小车教案doc等2份课件配套教学资源,其中PPT共9页, 欢迎下载使用。
小学科学湘科版 (2017)四年级上册2 改进小车精品课件ppt: 这是一份小学科学湘科版 (2017)四年级上册2 改进小车精品课件ppt,文件包含视频引导PPT湘科版4上第6单元第2课-改进小车pptx、02湘科版4上第6单元6-2-1方程式赛车的轮胎mp4等2份课件配套教学资源,其中PPT共5页, 欢迎下载使用。












