


还剩34页未读,
继续阅读
小学人美版2.机器人说课ppt课件
展开这是一份小学人美版2.机器人说课ppt课件,共42页。PPT课件主要包含了机器人概念,机器人的发展,为什么要发展机器人,FANUC,机器人的应用,点焊系统,弧焊系统,机器人上下料系统,机器人的分类,按用途划分等内容,欢迎下载使用。
一 机器人的概念二 机器人的发展三 机器人的应用四 机器人的分类五 工业机器人常用术语
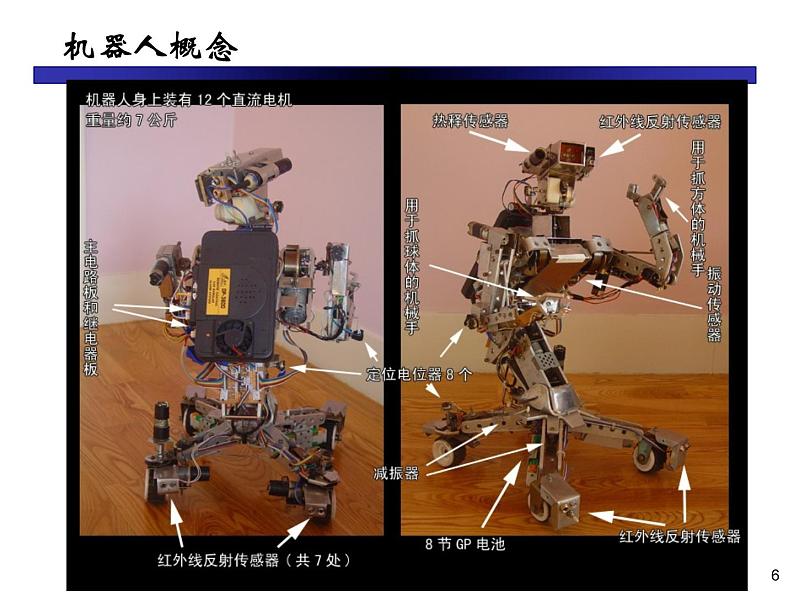
什么是机器人?一般的理解:机器人是具有一些类似人的功能的机械电子装置或者叫自动化装置,它是个机器。特点:有类人的功能。作业功能;感知功能;行走功能;能完成各种动作.根据人的编程能自动的工作。通过编程改变它的工作、动作、工作的对象和工作的一些要求。是人造的机器或机械电子装置,仍然是个机器 机器人学是一门不断发展的科学,上世纪60年代,可实用机械机器人被称为工业机器人;上世纪80年代到现在,正越来越向智能化方向发展。因此,对机器人的定义也随其发展而变化。
本田的ASIMO机器人
ASIMO 百度百科词条: ASIMO WIKIpetdia:
本田ASIMO 表演手势
机器人的定义: 国际上对机器人的定义很多The Webster dictinary (Webster, 1993) : “An autmatic device that perfrms functins nrmally ascribed t humans r a machine in the frm f a human.” 一个自动化设备,它能执行通常由人执行的任务;或一个人型的机器美国机器人学会(The Rbt Institute f America,1979) : “A reprgrammable, multifunctinal manipulatr designed t mve materials, parts, tls, r specialized devices thrugh varius prgrammed mtins fr the perfrmance f a variety f tasks.” 一个可再编程的多功能操作器,用来移动材料、零部件、工具等;或一个通过编程用于完成各种任务的专用设备。ISO,1987: 工业机器人是一种具有自动控制的操作和移动功能,能完成各种作业的可编程操作机。
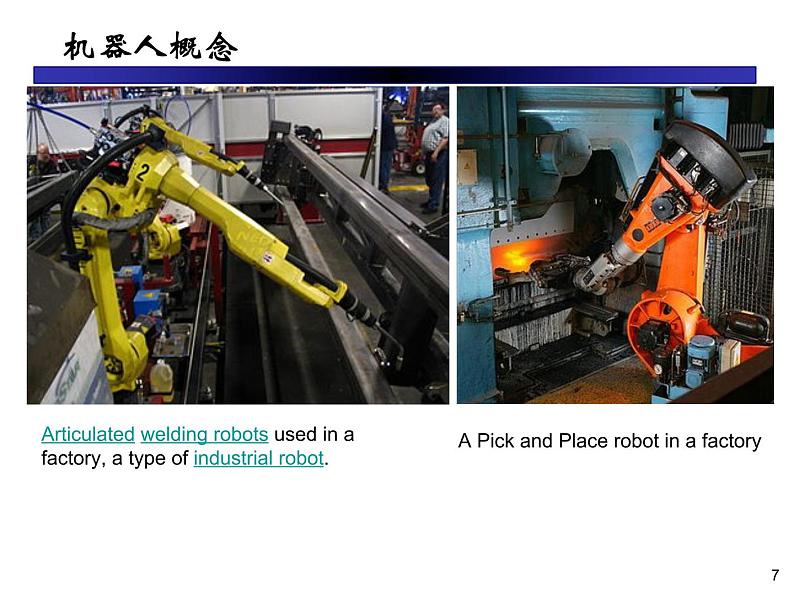
Articulated welding rbts used in a factry, a type f industrial rbt.
A Pick and Place rbt in a factry
性能强大 美国军用机器人展逆天战力
从完整的更为深远的机器人定义来看,应该更强调机器人智能,因此,机器人的定义是能够感知环境,能够有学习、情感和对外界一种逻辑判断思维的机器。机器人是一种计算机控制的可以编程的自动机械电子装置,能感知环境,识别对象,理解指示命令,有记忆和学习功能,具有情感和逻辑判断思维,能自身进化,能计划其操作程序来完成任务。
简单说,机器人有三个方面是我们必要去发展的理由:一个是机器人做人不愿意做的事,把人从有毒的、有害的、高温的或危险的,这样的环境中解放出来,机器人可以做人做不好的活,比方说在汽车生产线上工人天天拿着一百多公斤的焊钳,一天焊几千个点,做重复性的劳动,一方面他很累,但是产品的质量仍然很低;另一方面机器人做人做不了的活,这也是非常重要的机器人发展的一个理由,比方说人们对太空的认识,人上不去的时候,叫机器人上天,上月球,以及到海洋,进入到人体的小机器人,以及在微观环境下,对原子分子进行搬迁的机器人,都是人们不可达的工作。上述方面的三个问题,也就是说机器人发展的三个理由。
1920年,捷克作家卡雷尔·卡佩克发表了科幻剧本《罗萨姆的万能机器人》。卡佩克在剧本中把捷克语“Rbta”写成了“Rbt”,引起了大家的广泛关注,被当成了机器人一词的起源。
1950年,美国作家埃萨克·阿西莫夫在他的科幻小说《I,Rbt》中首次使用了“Rbtics” ,即“机器人学”。阿西莫夫提出了“机器人三原则”:1 机器人不应伤害人类,且在人类受到伤害时不可袖手旁观; 2 机器人应遵守人类的命令,与第一条违背的命令除外; 3 机器人应能保护自己,与第一条相抵触者除外。 机器人学术界一直将这三原则作为机器人开发的准则,阿西莫夫因此被称为“机器人学之父”。
1954年,美国人G.Devl 和J.Engleberger设计了一台可编程的机器人并在1956年获得美国专利1960年,Cnder公司购买专利并制造了样机。1961年, Unimatin公司(通用机械公司)成立,生产和销售了第一台工业机器“Unimate”,即万能自动之意。 Engleberger 被称为“机器人之父”。 1962年,(机械与铸造)公司,研制出一台数控自动通用机,取名“Versatran”,即多用途搬运之意,并以“Industrial Rbt”为商品广告投入市场。 1967年, Unimatin公司第一台喷涂用机器人出口到日本川崎重工业公司。
Unimates 机器人
Unimates WIKIpetdia:其他介绍:
1967年, Unimatin公司第一台喷涂用机器人出口到日本川崎重工业公司。1968年,第一台智能机器人Shakey在斯坦福研究所诞生。 1972年,IBM公司开发出直角坐标机器人。 1973年,Cincinnati Milacrn公司推出T3型机器人。 1978年,第一台PUMA机器人在Unimatin公司诞生。这标志着工业机器人技术已经完全成熟。PUMA至今仍然工作在工厂第一线。 1982年,Westinghuse公司兼并Unimatin公司,随后又卖给了瑞士的Staubli公司。
1984年 英格伯格再推机器人Helpmate,这种机器人能在医院里为病人送饭、送药、送邮件。同年,他还预言:“我要让机器人擦地板,做饭,出去帮我洗车,检查安全”。1998年 丹麦乐高公司推出机器人(Mind-strms)套件,让机器人制造变得跟搭积木一样,相对简单又能任意拼装,使机器人开始走入个人世界。1999年 日本索尼公司推出犬型机器人爱宝(AIBO),当即销售一空,从此娱乐机器人成为目前机器人迈进普通家庭的途径之一。2002年 丹麦iRbt公司推出了吸尘器机器人Rmba,它能避开障碍,自动设计行进路线,还能在电量不足时,自动驶向充电座。Rmba是目前世界上销量最大、最商业化的家用机器人。2006年 6月,微软公司推出Micrsft Rbtics Studi,机器人模块化、平台统一化的趋势越来越明显,比尔·盖茨预言,家用机器人很快将席卷全球
主要机器人厂家日本:Mtman、OTC、Panasnic、FANUC等美国:Adept等欧洲:奥地利IGM、德国CLOOS、KUKA、瑞典ABB、瑞士Staubli、意大利 Cmau 韩国:HYUNDAI沈阳新松 首钢莫托曼 上海ABB
欧洲十大知名工业机器人企业盘点
第一代机器人,也叫示教再现型机器人,它是通过一个计算机,来控制一个多自由度的一个机械,通过示教存储程序和信息,工作时把信息读取出来,然后发出指令,机器人可以重复的根据人当时示教的结果,再现出这种动作,比方说汽车的点焊机器人,它只要把这个点焊的过程示教完以后,它总是重复这样一种工作,它对于外界的环境没有感知,这个力操作力的大小,这个工件存在不存在,焊的好与坏,它并不知道,第一代机器人存在这种缺陷。在20世纪70年代后期,人们开始研究第二代机器人,叫带感觉的机器人,这种带感觉的机器人是类似人在某种功能的感觉,比如说力觉、触觉、滑觉、视觉、听觉和人进行相类比,有了各种各样的感觉,比方说在机器人抓一个物体的时候,它实际上力的大小能感觉出来,它能够通过视觉,能够去感受和识别它的形状、大小、颜色。抓一个鸡蛋,它能通过一个触觉,知道它的力的大小和滑动的情况。
第三代机器人,是机器人学中一个理想的所追求的最高级的阶段,叫智能机器人,只要告诉它做什么,不用告诉它怎么去做,它就能完成运动,感知思维和人机通讯的这种功能和机能,这个目前的发展还是相对的只是在局部有这种智能的概念和含义,但真正完整意义的这种智能机器人实际上并没有存在,而只是随着我们不断的科学技术的发展,智能的概念越来越丰富,它内涵越来越宽。
全系列点焊机器人,适用于汽车整车及零部件的点焊作业解决方案。工业点焊机器人的优点包括:稳定和提高焊接质量,保证其均一性;提高生产率,一天可24小时连续生产;改善工人劳动条件,可在有害环境下长期工作;降低对工人操作技术的要求;缩短产品改型换代的周期,减少相应的投资设备;可实现批量产品焊接自动化;节省地面空间;
各种规格的弧焊机器人,适用于汽车零部件行业及一般产业的需求。 工业弧焊机器人的优点包括:稳定和提高焊接质量,保证其均一性;提高生产率,一天可24小时连续生产;改善工人劳动条件,可在有害环境下长期工作;降低对工人操作技术的要求;缩短产品改型换代的周期,减少相应的投资设备;可实现批量产品焊接自动化;节省地面空间
采用机器人上下料在机床行业内正在逐步大量使用,包括数控车床上下料机器人、数控冲床上下料机器人、数控加工中心上下料机器人等等。机床上下料机器人的优点包括:更大的灵活性,从固定的自动化;通过机器人视觉减少到最小的错误;具有高速性能的最大化吞吐量;超长的系统运行时间;
视频:1)广州数控工业机器人实现车间自动化加工车间2)KUKA工业机器人玻璃包边3)ABB工业机器人IRB120协同装配鼠标视频
机器人的种类很多。可以按驱动形式、用途、结构和智能水平等观点划分
关节(Jint):即运动副,允许机器人手臂各零件之间发生相对运动的机构。
连杆(Link):机器人手臂上被相邻两关节分开的部分。
自由度(Degree f freedm) :或者称坐标轴数,是指描述物体运动所需要的独立坐标数。手指的开、合,以及手指关节的自由度一般不包括在内。
刚度(Stiffness):机身或臂部在外力作用下抵抗变形的能力。它是用外力和在外力作用方向上的变形量(位移)之比来度量。
定位精度(Psitining accuracy):指机器人末端参考点实际到达的位置与所需要到达的理想位置之间的差距。
重复性(Repeatability)或重复精度: 在相同的位置指令下,机器人连续重复若干次其位置的分散情况。它是衡量一列误差值的密集程度,即重复度。
工作空间(Wrking space):机器人手腕参考点或末端操作器安装点(不包括末端操作器)所能到达的所有空间区域,一般不包括末端操作器本身所能到达的区域。
相关课件
小学美术人美版三年级上册2.机器人教学课件ppt:
这是一份小学美术人美版三年级上册2.机器人教学课件ppt,共26页。PPT课件主要包含了机器人,外国的机器人,中国的机器人,分析画面,作品欣赏,先行者,会说相声的机器人,作业欣赏等内容,欢迎下载使用。
小学美术人美版三年级上册2.机器人课文内容课件ppt:
这是一份小学美术人美版三年级上册2.机器人课文内容课件ppt,共25页。PPT课件主要包含了机器人,外国的机器人,中国的机器人,分析画面,作品欣赏,先行者,会说相声的机器人,作业欣赏等内容,欢迎下载使用。
人美版三年级上学期2.机器人背景图ppt课件:
这是一份人美版三年级上学期2.机器人背景图ppt课件,共16页。PPT课件主要包含了比一比,机器人的外形结构,生活中的机器人,微型机器人,艺术实践,你有好的创意吗,机器人大比拼,评价要点等内容,欢迎下载使用。











