
还剩1页未读,
继续阅读
高中物理教科版选修3-5第二章 原子结构1 电子巩固练习
展开
这是一份高中物理教科版选修3-5第二章 原子结构1 电子巩固练习,共2页。
共 2 页第 1 页
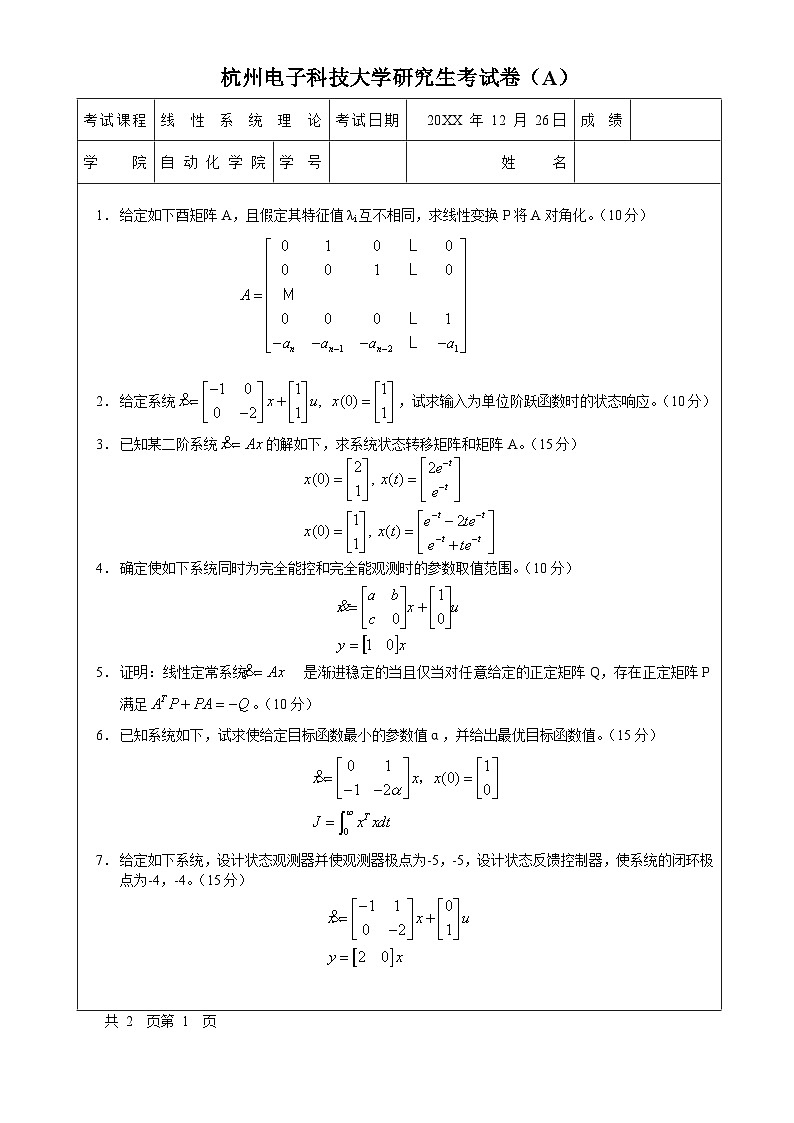
共 2 页第 2 页考试课程
线性系统理论
考试日期
20XX 年 12 月 26日
成 绩
学院
自动化学院
学号
姓名
给定如下酉矩阵A,且假定其特征值λi互不相同,求线性变换P将A对角化。(10分)
给定系统,试求输入为单位阶跃函数时的状态响应。(10分)
已知某二阶系统的解如下,求系统状态转移矩阵和矩阵A。(15分)
确定使如下系统同时为完全能控和完全能观测时的参数取值范围。(10分)
证明:线性定常系统 是渐进稳定的当且仅当对任意给定的正定矩阵Q,存在正定矩阵P满足。(10分)
已知系统如下,试求使给定目标函数最小的参数值α,并给出最优目标函数值。(15分)
给定如下系统,设计状态观测器并使观测器极点为-5,-5,设计状态反馈控制器,使系统的闭环极点为-4,-4。(15分)
给定受控系统 和性能指标,试确定最优状态反馈增益和最优性能值。(15分)
共 2 页第 1 页
共 2 页第 2 页考试课程
线性系统理论
考试日期
20XX 年 12 月 26日
成 绩
学院
自动化学院
学号
姓名
给定如下酉矩阵A,且假定其特征值λi互不相同,求线性变换P将A对角化。(10分)
给定系统,试求输入为单位阶跃函数时的状态响应。(10分)
已知某二阶系统的解如下,求系统状态转移矩阵和矩阵A。(15分)
确定使如下系统同时为完全能控和完全能观测时的参数取值范围。(10分)
证明:线性定常系统 是渐进稳定的当且仅当对任意给定的正定矩阵Q,存在正定矩阵P满足。(10分)
已知系统如下,试求使给定目标函数最小的参数值α,并给出最优目标函数值。(15分)
给定如下系统,设计状态观测器并使观测器极点为-5,-5,设计状态反馈控制器,使系统的闭环极点为-4,-4。(15分)
给定受控系统 和性能指标,试确定最优状态反馈增益和最优性能值。(15分)
相关试卷
高中物理人教版 (新课标)选修2第5节 机械同步训练题: 这是一份高中物理人教版 (新课标)选修2<a href="/wl/tb_c21456_t7/?tag_id=28" target="_blank">第5节 机械同步训练题</a>,共2页。
物理-秋季高三开学摸底考试卷(江苏卷)02: 这是一份物理-秋季高三开学摸底考试卷(江苏卷)02,文件包含物理-高三秋季开学摸底考试卷江苏卷解析版02docx、物理-高三秋季开学摸底考试卷江苏卷试卷版02docx、物理-秋季高三开学摸底考试卷江苏卷答题卡02docx、物理-秋季高三开学摸底考试卷江苏卷答案及评分标准02docx等4份试卷配套教学资源,其中试卷共33页, 欢迎下载使用。
物理-秋季高三开学摸底考试卷01(江苏卷): 这是一份物理-秋季高三开学摸底考试卷01(江苏卷),文件包含高三秋季开学摸底考试卷江苏卷解析版docx、高三秋季开学摸底考试卷江苏卷试卷版docx、秋季高三开学摸底考试卷江苏卷答案及评分标准docx、秋季高三开学摸底考试卷江苏卷答题卡docx等4份试卷配套教学资源,其中试卷共36页, 欢迎下载使用。











