2021金华义乌高三下学期5月高考适应性考试通用技术试题含答案
展开义乌市2021届高三适应性考试
通用技术 试卷
一、选择题(本大题共13小题,每小题2分,共26分。每小题列出的四个备选项中只有一个是符合题目要求的,不选、多选、错选均不得分)
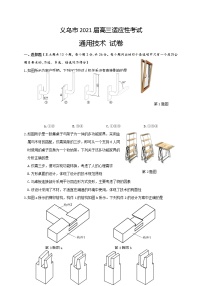
1.如图所示为窗户手柄,下列尺寸中对人机关系没有直接影响的是
A.①② B.③④ C.①②③ D.①③④
2.如图所示是一款集桌子与架子为一体的多功能家具,采用金
属与木材的搭配,仅需简单的三步,即可从一个支持6人同
时使用的桌子变身为一个收纳架。下列关于该多功能家具的
分析正确的是
A.仅需三步,便可实现功能转换,考虑了人的心理需求
B.方形桌面的设计,体现了设计的技术规范原则
C.与桌板连接部分采用平行四边形方式变形,主要考虑了物的因素
D.该设计采用了木材,不适宜在潮湿的环境中使用,体现了技术的两面性
3.如图a所示的榫卯结构,构件1的结构如图b所示。下列构件2的设计方案中正确的是
第3题图a 第3题图b
A. B. C. D.
通用技术课上,小明设计了如图所示的零件(厚度为3mm),请根据题图完成第4-5题。
4.图中漏标的尺寸共有
A.2处
B.3处
C.4处
D.5处
5.小明准备用45mm×45mm×3mm的钢板制作该零件,下列说法
中合理的是
A.制作该零件需要用到划针、划规、平锉和圆锉等工具
B.划线时,应先划基准线,再画轮廓线,最后完成加工尺线
C.加工φ8不规则孔的流程是:划线→钻孔→锯割→锉削
D.钻孔时,用手钳夹紧钢板,戴好防护眼镜,对准冲眼开始钻孔
6.如图是一种可升降的工作台,手摇柄通过螺杆与可滑动齿条相连,顺时针转动可以抬升桌面,逆时针转动可以降低桌面。当桌面上升时,手摇柄、螺杆和横杆的主要受力形式是
A.手摇柄受弯曲、螺杆受扭转和受拉、横杆受拉
B.手摇柄受弯曲和受扭转、螺杆受扭转和受压、横杆受拉
C.手摇柄受弯曲、螺杆受扭转和受拉、横杆受压
D.手摇柄受弯曲和受扭转、螺杆受扭转和受拉、横杆受压
7.下列图表不属于流程的是
A.生活垃圾分类指引 B.某产品生产工艺示意图
C.考试日程安排 D.某大学的三位一体招生程序
如图所示是板带材轧制过程中的厚度控制系统。通过测厚仪对板带材实际轧出厚度连续地进行测量,并根据实测值与给定值相比较后的偏差信号,借助于控制回路和装置或计算机的功能程序,改变轧辊的位置、张力或轧制速度,把板带材厚度控制在允许偏差范围之内。请根据示意图及描述完成第8-9题。
8.下列关于板带材轧制厚度控制系统的分析中不正确的是
A.执行机构根据控制装置的控制命令及时调整控制量,体现了系统的相关性
B.能将板带材厚度控制在允许偏差范围之内,体现了系统的目的性
C.测厚仪的精度是影响该系统优化的因素
D.借助于控制回路和装置或计算机的功能程序,改变轧辊的位置、张力或轧制速度,体现了系统分析的科学性原则
9.下列关于板带材轧制厚度控制系统的分析中正确的是
A.输入量是板带材
B.输出量是轧辊的位置、张力或轧制速度
C.当板带材厚度出现偏差时,测厚仪与轧辊之间的距离L越大,控制系统调整越及时
D.使用一段时间后,轧辊略微磨损,不会影响控制系统的精度
10. 如图所示为通用技术实践室常用电子元件,其中实物、符号及描述均正确且属于传感器的是
11.如图所示是小明搭建的光线报警电路,当环境光线低
于国家标准规定的最低限度时,会发出声光报警信号。
其中LED1和LED2的导通电压均为3V。下列关于该电
路的分析中正确的是
A.环境光线慢慢变暗,当LED1熄灭时,LED2马上点亮
B.当环境光线足够暗时,V1截止,V2工作在饱和状态
C.当LED2点亮时,将R3调小,流过LED2的电流变大
D.调试时发现环境光线设定值偏高,可将R1调小
12.小明打算制作一个电池电压警示装置,被测电池正常电压为12V,当被测电池电压低于10.2V时警示灯LED点亮,这时只有移开被测电池LED才会熄灭,以下四个设计电路中不可行的是
A. B.
C. D.
13.小明设计了如图所示的自动浇花电路,当探头检测到泥土湿度太小且雨水池有水时,水泵M将水从雨水池抽到花盆;当花盆泥土足够湿时,水泵M停止抽水;如果雨水池没有水时,即使花盆缺水水泵M也不工作。以下说法正确的是
A.水泵M工作时,2脚的电位一定小于Vcc
B.LED为水泵M工作指示灯,当水泵工作时发光
C.电位器Rp1触点下移,可提高湿度下限设定值
D.若555芯片损坏,可用一片四2输入与非门芯片代替,实现电路原有功能
二、非选择题(本大题共4小题,第14题6分,第15题9分,第16题3分,第17题6分,共24分)
14.如图a所示为焊接机器人系统,主要包括控制柜、机器人本体及焊接设备三部分。焊接机器人的基本工作原理是示教再现,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数、焊接参数等,并自动生成一个连续执行全部操作的程序。之后机器人可以准确地按示教动作完成操作任务。请根据示意图和描述,完成以下任务。
第14题图a
(1)焊接机器人可以通过示教掌握焊接操作,能完成工件上需要的焊接任务,该系统的控制方式属于 ▲ (在“A.开环控制;B.闭环控制”中选择合适的选项,将序号填入“ ▲ 处);
(2)设计焊接机器人时,应该先设定总体要求,然后分成控制柜、机器人本体及焊接设备几部分分别进行设计,体现了系统分析的 ▲ (在“A.整体性原则;B.科学性原则;C.综合性原则”中选择合适的选项,将序号填入“ ▲ ”处);
(3)焊接机器人在实际操作中出现了焊缝偏移,下列不属于该控制系统干扰因素的是 ▲ (在“A.工作电压不稳定;B.示教时不够精确;C.变位机动作有偏差”中选择合适的选项,将序号填入“ ▲ ”处);
(4)为了使焊接的方位更灵活,除了机械手末端(焊枪)能转动之外,放置被焊工件的平台也会转动,这样的平台称为变位机。如图b所示是一种变位机,根据示意图,被焊机件放在工作台上不可以实现
▲ (在A.水平旋转;B.竖直旋转;C.在倾斜面上旋转;D.水平移动中选择合适的选项,将序号填入“ ▲ ”处);
第14题图b
(5)变位机圆形平台上设计的凹槽是为了利用螺帽和螺栓固定夹具(夹持被焊工件),以下是四种凹槽结构的横截面示意图,其中不合理的是 ▲ (在下列选项中选择合适的选项,将序号填入“ ▲ ”处);
A. B. C. D.
(6)焊接机器人可以准确地按示教动作完成焊接任务,运用了控制中的 ▲ 方法。(在A.系统分析;B.黑箱;C.功能模拟;D.虚拟试验中选择合适的选项,将序号填入“ ▲ ”处);
15.小明家的可拆卸相机三脚架已破损,剩下如图A所示的主杆部分(直径为20mm)与支撑脚。小明想对其改进利用,设计一种可以通过手摇柄调节高度的三脚架。他找到如图B所示的钢环和手摇柄,并设想按照如图C的方式固定主杆,手摇柄插入钢环其中钢环与支撑脚的连接小明已找到解决办法,现请你帮助小明设计插入钢环里的手摇柄部分与主杆之间的传动装置,要求如下:
①主杆和钢环允许钻孔加工处理;
②主杆可连续调节,可调范围为0~500mm;
③主杆可以保持在所调节的高度;
④传动部分与手摇柄、主杆连接牢固合理
⑤材料自选。
请完成以下任务:
(1)小明发现问题的途径是 ▲ (在“A.观察日常生活;B.收集和分析信息;C.技术研究与技术试验”中选择合适的选项,将序号填入“ ▲ ”处);
(2)小明需要在钢环上钻孔以便手摇柄能插入钢环内使用,以下三种孔形中最合理的是 ▲ (在下列选项中选择合适的选项,将序号填入“ ▲ ”处)。
A. 腰形孔 B. 圆孔 C.半圆孔
(3)设计该装置时,以下因素中可以不考虑的是 ▲ (在“A.支撑脚的折叠方式;B.主杆的直径;C.钢环内的空间大小”中选择合适的选项,将序号填入“ ▲ ”处)。
(4)综合以上信息,请你画出设计草图,必要时可用文字说明(如果画主杆,只需画圆柱部分;如果画手柄,只需画钢环内部分)
(5)在设计草图上标注主要尺寸。
16.请补全三视图中所缺的三条图线(超过三条图线倒扣分)
17.如图a所示是定时控制气雾栽培控制系统示意图,当液温、液位、PH值及盐分均符合要求时系统定时对作物喷洒营养液。小明为其设计了如图b所示的实验电路。其中PH值和盐分正常时B输出高电平,探头F用于检测储液箱中的营养液液位值,负温度系数热敏电阻Rt用于检测储液箱温度。当检测到储液箱温度值低于15℃且储液箱液位高于F点时,加热丝加热,使储液箱温度值达到设定温度。到达设定时间,定时器输出高电平触发信号,之后恢复低电平,当液位在F点以上、PH值和盐分正常且加热器不加热时喷雾泵开启喷雾;喷雾过程中,一旦检测到液温、液位、PH值及盐分中任一项不符合要求立即停止喷雾。请完成以下任务:
(1)当加热丝不加热时,D点的电平为 ▲ (在“A.高电平;B.低电平;C.不能确定”中选择合适的选项,将序号填入“ ▲ ”)
(2)虚线框1处缺少一个逻辑门,请从教材中学过的逻辑门中选择一个符合控制要求的,将逻辑符号画在虚线框1中;
(3)请你使用不超过四个2输入与非门设计虚线框2中的电路,实现上述功能;
(4)调试时发现由于只有单点进行温度控制,继电器J1触点开闭频繁,小明设计了如图C所示的电路,想将储液箱的温度控制在15℃~25℃之间,请用一个电阻和一个二极管帮助小明完成虚线框3中的电路设计。
通用技术答案
一、选择题(2*13=26分)
题号 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
选项 | A | C | B | C | D | B | A |
题号 | 8 | 9 | 10 | 11 | 12 | 13 |
|
选项 | D | D | A | C | B | C |
|
二、非选择题(本大题共4小题,第14小题6分,第15小题9分,第16小题3分,第17小题6分,共24分)
14.(1) A ;(2) A ;(3) B ;
(4) D ;(5) C ;(6) C 。
15.(1) A ;(2) B ;(3) A 。解放人
(4)评分标准:
1.能够和手柄转轴牢固连接(1分);
2.能够和主杆牢固连接(1分);
3.能实现主杆上下移动(1分);
4.有一定的承载能力(如手拧螺丝拧紧固定、蜗杆蜗轮自锁功能等)(1分);
(5)评分标准:与电机转轴连接处的半圆孔尺寸为R5、齿条可调部分高度500,标对一个得1分,总共2分。
参考草图:
方案一 方案二
16.(3分)
17.(1) C ;(1分)
(2)(1分)
(3)(2分)
| 或 | 或
|
(4)(2分)
2021届浙江省金华市义乌市高三下学期5月高考适应性考试通用技术试题 PDF版: 这是一份2021届浙江省金华市义乌市高三下学期5月高考适应性考试通用技术试题 PDF版,共13页。
2020义乌高三6月适应性考试通用技术试题PDF版含答案: 这是一份2020义乌高三6月适应性考试通用技术试题PDF版含答案
2020义乌高三6月适应性考试通用技术试题含答案: 这是一份2020义乌高三6月适应性考试通用技术试题含答案